













Product Description

MROS Lidar Car ROS Mecanum Wheel Radar Car
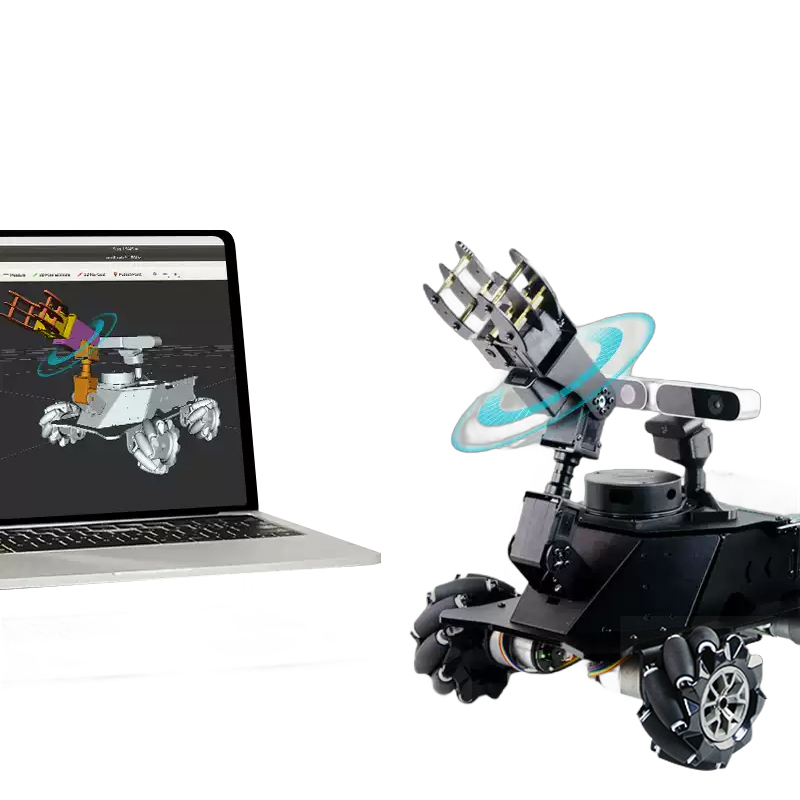
This product is driven by the ROS system. The Mecanum wheel car is agile and can move in all directions. It can move freely in a small space. The Moveit robot arm is like a precise hand, with multiple joints that can rotate flexibly and handle complex grasping and assembly tasks. LiDAR navigation is like a keen "eye", scanning and building maps in real time, accurately planning paths, and not afraid of unknown environments. Coupled with the depth camera, it has delicate perception capabilities, and the depth information is collected in detail, providing accurate basis for control and obstacle avoidance. Whether it is scientific research or industrial operations, it can show its prowess.


Product Features

360° laser measurement radar
12m radius wide range measurement
- 12m radius measurement range
- 8000 times/s measurement range
- 360° scanning detection
- OPTMAG optical magnetic fusion

Dynamic interaction of robotic arms
Move_group communicates with the robot through ROS topics and actions, obtains the robot's status (position, nodes, etc.), obtains point cloud or other sensor data, and then transmits it to the robot controller

Depth camera
Real-time video transmission
Secondary development of visual recognition and visual SLAM
The robot has RGBD depth and deep learning

Mecanum wheel omnidirectional movement
Mobile phone control of ROS Mecanum wheel radar car can make the car move in an "米" shape in all directions
Three controllable speeds: low speed, medium speed, high speed
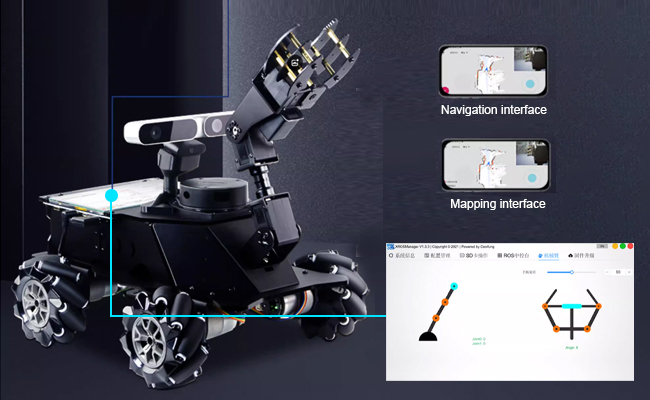
XR-ROS human-computer interaction system
The robot is equipped with the "XR-ROS human-machine interaction system" independently developed by XiaoR Technology. With the "ROSXRMaster" exclusive APP, it can realize interactive operations such as real-time mapping or navigation on the mobile phone. Even if you have no programming foundation, you can use it easily.

ROS+ Robotic Arm
Kinematic visual grasping
The robot arm uses the Kinematics Plugin
You can also write your own inverse kinematics algorithm
With the camera, you can achieve functions such as visual grasping of objects

7-inch touch screen for real-time control
Easy-to-use ROS robot user interaction system

Indoor autonomous path planning
Multi-point positioning function, autonomous path planning, avoiding obstacles, and reaching the destination in order
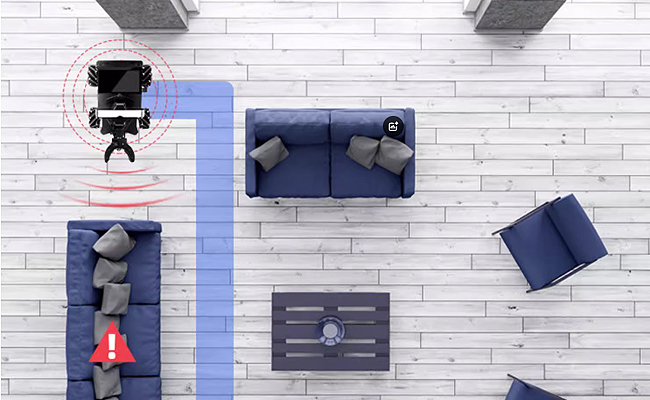
Indoor autonomous navigation and dynamic obstacle avoidance
Plan the path based on the indoor map, and perform secondary planning when the road is blocked to achieve dynamic obstacle avoidance
Application Cases
In the science and technology innovation class on campus, MROS Lidar Car (ROS Lidar Car) has become a powerful partner for children to explore programming and the intelligent world. With the help of LiDAR navigation, it can intelligently avoid obstacles and autonomously plan paths. The Mecanum wheel design makes its movement diverse and interesting. Students control the car by writing code, combining deep programming learning with practical operations, opening the door to artificial intelligence in an entertaining way and stimulating unlimited creativity.



Technical Parameter
| Parameter name | Parameter value | Parameter name | Parameter value |
|---|---|---|---|
| Product name | XiaoR/MROS radar car | Bottom driver board | PWR.4RPL.E |
| Core processor | JETSON NANO Quad-coreARM quad-core A57 | Car body dimensions length, width and height | 320*270*250*mm |
| Car body weight | 3620g | Robot arm length | 280mm |
| Maximum clamping width | 100mm | Robotic arm degrees of freedom | 4 degrees of freedom |
| Control range | ≤30M | Maximum clamping weight of robot arm | 300g |
| Rotation range of the robot arm | 0-180° | programming language | Python/C++ language |
| Network card | Intel8265 | Camera | Depth camera |
| Radar | Rplidar A1 | Display | 1080P high-definition touch screen (capacitive screen) |
| Usage time | 2-5 hours | Motor | DC brushed motor (with 360-line AB encoding) |
| Battery specifications | 10000mah 12.6V | Speed | 0.8m/s |
Packing list
- MROS complete trolley machine
- High definition depth camera
- Four degrees of freedom mechanical arm
- Instructions
- 2.4G mini wireless keyboard and mouse, driver-free
- Control handle
- Screwdriver
- Card reader
- Data cable


