













产品描述

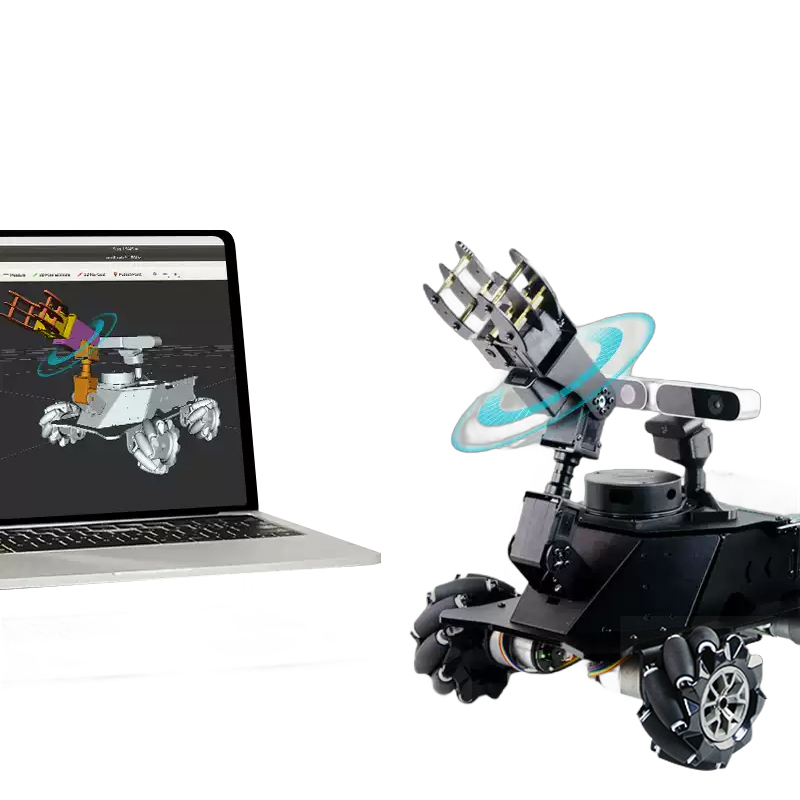
MROS Lidar Car ROS麦轮雷达车
这款产品以 ROS 系统为核心驱动,麦克纳姆轮小车灵动敏捷,实现全向平移,狭小空间也能自如穿梭。搭配的 Moveit 机械臂宛如精准的巧手,多关节灵活转动,胜任复杂抓取、装配任务。激光雷达导航如同敏锐的“双眼”,实时扫描构建地图,精准规划路径,不惧未知环境。再加上深度摄像头,赋予其细腻感知能力,深度信息采集详实,为操控、避障提供精准依据,无论是科研探索还是工业作业,它都能大显身手。


产品特性

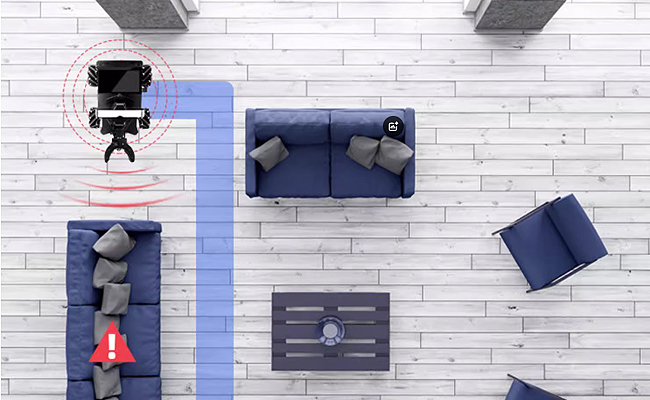
360°激光测量雷达
12m半径大范围测量
- 12m半径测量范围
- 8000次/s 测量范围
- 360°扫描检测
- OPTMAG光磁融合

机械臂动态交互
Move_group通过ROS topics 和 actions与机器人通讯,获取机器人的状态(位置,节点等)获取点云或其他传感器数据,再传递机器人控制器
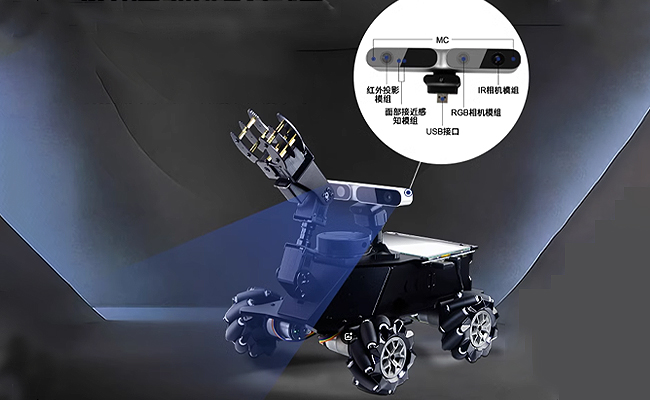
深度摄像头
实时视频传输
可二次开发视觉识别、视觉SLAM
机器人具有RGBD深度、深度学习

麦克纳姆轮全向移动
手机控制ROS麦轮雷达车可让小车做出米字全向移动
三种可控速度调节:低速、中速、高速
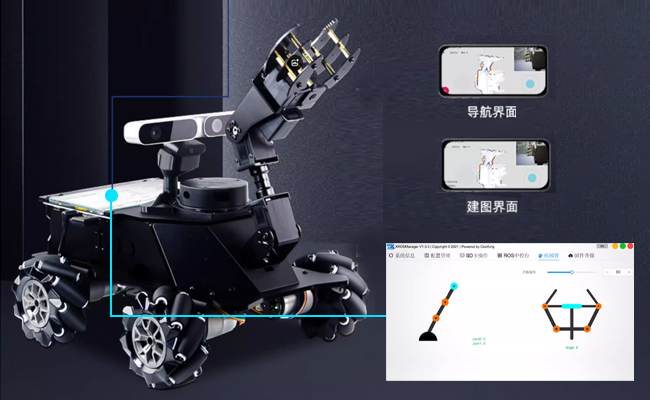
XR-ROS人机交互系统
机器人配备小R科技自主研发的“XR-ROS人机交互系统”
配合“ROSXRMaster”专属APP可以实现在手机端实时建图或导航等交互操作,
即使没有编程基础,也可以轻松使用,

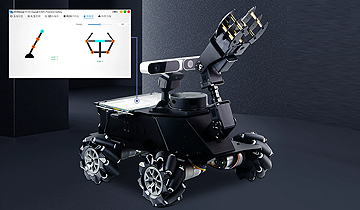
ROS+机械臂
运动学视觉抓取
机械臂采用运动学插件(The Kinematics Plugin)
也可以自己编写自己的逆向运动算法
配合摄像头可实现视觉抓取物体等功能

7英寸触摸大屏实时操控
易于上手的ROS机器人用户交互系统

室内自主路径规划
多点定位功能,自主路径规划,避开障碍物,按顺序到达目的点
室内自主导航动态避障
根据室内地图,规划路径,
在道路不通时会进行二次规划,实现动态避障
应用案例
在校园的科技创新课堂上,MROS Lidar Car(ROS 麦轮雷达车)成为孩子们探索编程与智能世界的得力伙伴。借助激光雷达导航,它能智能避障、自主规划路径,麦克纳姆轮设计让其移动方式多样有趣。学生们通过编写代码操控小车,结合深度编程学习与实践操作,在寓教于乐中开启通往人工智能的大门,激发无限创造力。



技术参数
| 参数名 | 参数值 | 参数名 | 参数值 |
|---|---|---|---|
| 产品名称 | 小R/MROS麦轮雷达车 | 底层驱动板 | PWR.4RPL.E |
| 核心处理器 | JETSON NANO Quad-coreARM四核心A57 | 车体尺寸长宽高 | 320*270*250*mm |
| 车体自重 | 3620g | 机械臂长度 | 280mm |
| 最大夹持宽度 | 100mm | 机械臂自由度 | 4自由度 |
| 控制范围 | ≤30M | 机械臂最大夹持重量 | 300g |
| 机械臂转动范围 | 0-180° | 编程语言 | Python/C++语言 |
| 网卡 | Intel8265 | 摄像头 | 深度摄像头 |
| 雷达 | Rplidar A1 | 显示屏 | 1080P高清触摸屏(电容屏) |
| 使用时间 | 2-5个小时 | 电机 | 直流有刷电机(自带360线AB编码) |
| 电池规格 | 10000mah 12.6V | 车速 | 0.8m/s |
包装清单
- MROS 小车整机
- 高清深度摄像头
- 四自由度机械臂
- 说明书
- 2.4G迷你无线键鼠 免驱
- 控制手柄
- 螺丝刀
- 读卡器
- 数据线


