














产品描述

自主导航机器人平台是具有在危化特种场景下模块化建图、定位、自主导航、路径规划、自主避障绕障等功能的危化全场景平台方案,支持多场景应用拓展与模块化搭载。自主导航机器人构建危化特种场景应用模块化机器人平台,支持搭载集成各种应用为危化特种场景如:可燃性气体、粉尘环境、火车油、石化厂、加油站、加氢站、弹药库、危化码头等场景提供专业可靠数据采集与复合作业机器人平台。
产品特性

L4级封闭场景自主导航
整体软件架构 环境感知算法
规划决策算法 底层控制算法
导航定位算法

AUTO MS自主导航功能点说明
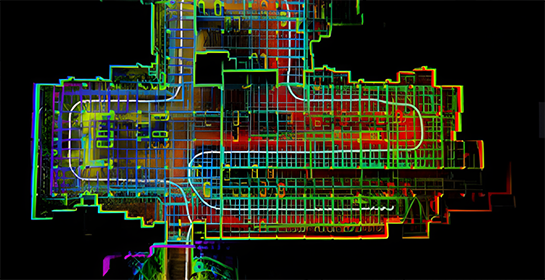
地图构建:精确的2D/3D环境地图构建
精确定位:厘米级定位精度
自主导航:点到点自主规划合理路径
路径规划:APP端直接绘制期望路径
智能绕障:主动生成局部绕障路径
自主充电:给定充电任务,自主完成充电对接
定点设置:可设置多个任务点与充电点
路径组合:根据实际需求对多路径进行自由组合
地图编辑:绘制虚拟墙明确导航禁区
标准SDK:用户可基于YUHESEN自主导航机器人平台集成自动驾驶API接口,实现快速二次搭建开发

AUTO MS自主导航机器人平台配置说明:
感知硬件:16线激光雷达、超声波雷达,
通讯硬件:车规级CAN通讯,千兆网络交互平台,
算力硬件:多冗余超算BOX平台(NVIDIA/INTEL),
平台硬件:FB-001 模块化机器人平台,
应用软件:AUTO MS APP(安卓)/标准二次开发SDK。
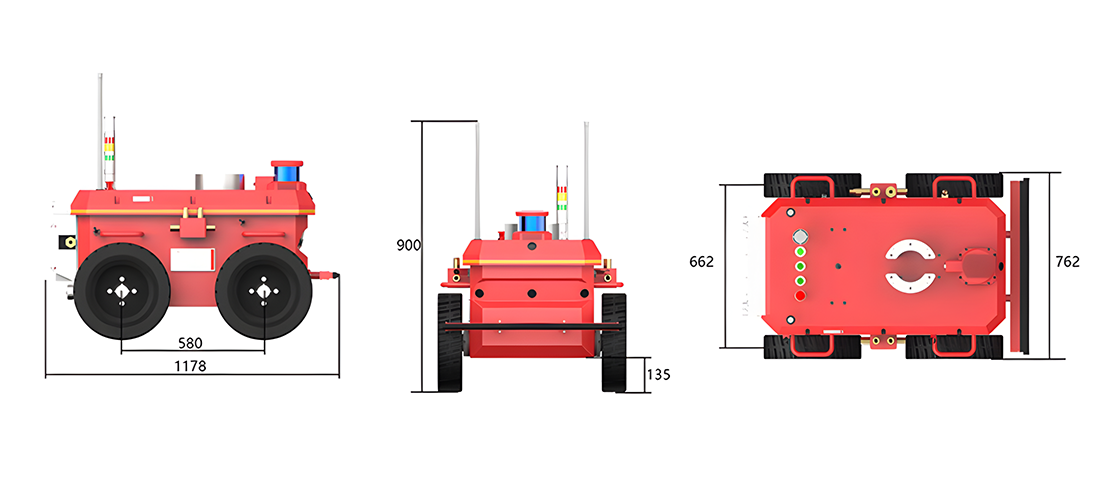
结构示意图
产品参数
| 名称 | 参数 |
|---|---|
| 设计尺寸 | 1178*762*900mm |
| 整车质量 | 270kg |
| 结构形式 | 四轮差速 |
| 底盘主要材质 | Q235 |
| 离地间隙 | 135mm |
| 轴距 | 580mm |
| 轮距 | 662mm |
| 轮胎直径 | 400mm |
| 驱动电机 | 1000W*4,直流伺服电机 |
| 电池 | 36V/60AH |
| 充电时间 | 3-4h |
| 充电方式 | 36V/18A手动-36V/6A无线充电 |
| 工作温度 | -20°C-60°C |
| 制动方式 | 电机制动 |
| 驻车方式 | 电机驻车 |
| 通信方式 | CAN 2.0B |
| 运动学解析 | √ |
| 遥控距离 | 50m |
| 运行速度 | 4.5km/h |
| 续航里程 | 15km |
| 涉水深度 | 140mm |
| 最大爬坡角度 | 15° |
| 越障高度 | 满载80mm |
| 防护等级 | IP65 |
我们的工厂


产品证书
展会与实力


服务
- 售前-助力合理选型
项目评估工程师对接,深入沟通了解使用工况,确认合适的选型和规格,给到客户合理的建议,有效避免生产中出现的问题。
- 售中-保障生产交付
专属工程师和业务专员对接,项目主管对过程控制,积极沟通互动,及时发现问题和时效沟通,为生产交付保驾护航。
- 售后-及时响应处理
售后有工程人员对接,当天响应;并及时到现场确认、讨论、解决处理问题,满足客户生产需求,避免停工停产现象。


