

产品描述
低 速 稳 低 噪 音 高 精 度
承 载 力 强 精 准 控 制 便 捷 操 作
产品亮点简介:
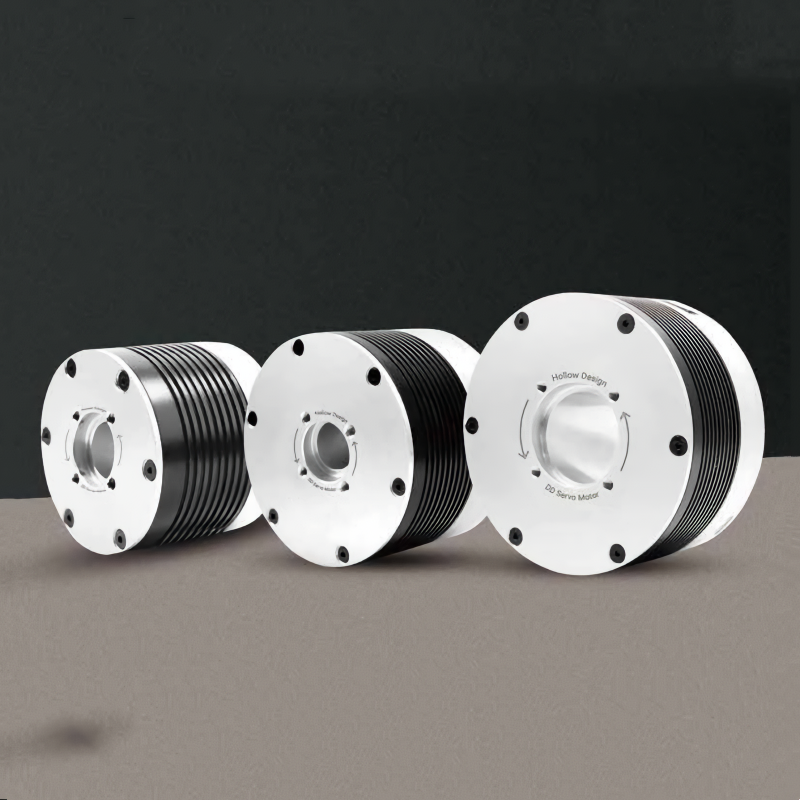
ER系列一体化直驱关节模组专为协作机器人、服务机器人、AGV及精密自动化设备打造,具备“小体积、轻质量、高响应、大力矩”的显著优势。模组内置高精度17bit编码器,单步控制精度优于0.01°,确保机器人动作的精准与流畅。全系列采用中空结构设计,为布线和集成提供极大便利,是新一代紧凑型机器人关节的理想选择。
性能与工艺优势:
ER系列采用公司自主研发的专利通信协议,支持多种主流接口(CANbus),实现高速稳定控制响应。核心零部件由公司自有工厂制造,从电机减重结构到高性能驱动控制系统,皆体现出对性能与效率的极致追求。相比市面同类产品,ER系列在响应速度、尺寸优化和控制精度方面具有明显优势,适配更多机器人智能关节应用场景。
应 用 领 域
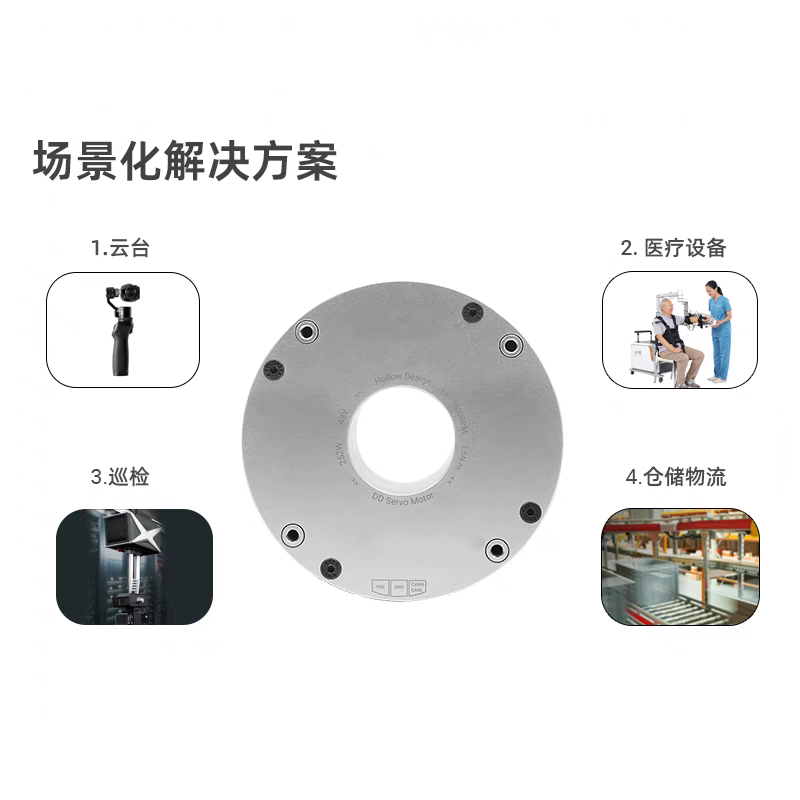
ER系列一体化关节模组广泛应用于人形机器人、机械臂、外骨骼机器人、四足机器人、AGV智能搬运车及教育科研机器人等先进机器人技术领域。凭借高集成度、中空结构设计及高精度控制性能,该系列产品为多自由度运动控制提供强劲支持,是智能机器人系统实现灵巧动作与高效执行的核心驱动单元。
人 形 机 器 人

机 械 臂
外 骨 骼 机 器 人

四 足 机 器 人
AGV 智 能 搬 运 车
教 育 科 研 机 器 人
选择ER系列关节模组,意味着选择了高效开发、可靠性能与广阔适配性。我们致力于为全球开发者、集成商与终端用户提供更加智能、灵活的运动控制解决方案,助力您的机器人产品快速实现从构想到落地的飞跃。
产品参数
以下是该系列产品的选型介绍,供您参考:
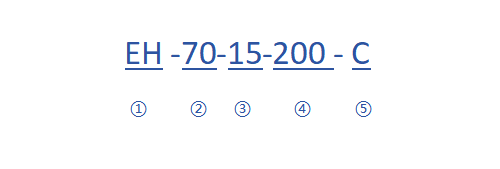
① EH代表系列名:一体化中空直驱模组 ② 70代表基座号 例如:50/70/90等
③ 定子叠高 15 ④ 电机功率 200
⑤ 通讯方式 C:CANbus E:Ethercat
例如:
型号 ER-90-15-400-C
说明 ER:中空直驱系列模组 90:基座号
15:定子叠高 400:电机功率 C:CANbus 通信
参 数 | ER-50-15 | ER-70-15 | ER-90-15 |
外径(mm) | 50 | 70 | 90 |
输入电压(V) | 24 | 48 | 48 |
空载转速(RPM) | 3200 | 2800 | 2000 |
空载电流(A) | 0.4 | 0.18 | 0.35 |
额定转速(RPM) | 2500 | 2400 | 1600 |
额定转矩(N.m) | 0.35 | 0.8 | 1.5 |
额定功率(W) | 91.6 | 200 | 252 |
额定电流(A) | 4.9 | 4.4 | 6.6 |
峰值扭矩(N.m) | 0.9 | 2 | 3.75 |
峰值电流(A) | 12.4 | 13.2 | 19.8 |
效率(%) | >83% | >84% | >83% |
反电势常数(Vdc/Krpm) | 7.93 | 17 | 21.1 |
扭矩常数(N.m/A) | 0.07 | 0.18 | 0.23 |
线电阻(Ω) | 0.4 | 0.5 | 0.35 |
线电感(mH) | 0.19 | 0.55 | 0.28 |
极对数 | 13 | 13 | 16 |
齿槽转矩(mN.m) | 12 | 30.83 | 64 |
接线方式3 | Y | Y | Y |
最大轴向负载(N) | 489 | 1870 | 2350 |
最大径向负载(N) | 100 | 440 | 770 |
转动惯量(Kg.m2) | 0.005 | 0.01 | 0.05 |
编码器类型及接口 | ABS-17bit | ABS-17bit | ABS-17bit |
重复定位精度(Degree) | <0.01 | <0.01 | <0.01 |
通信方式 | CAN | CAN | CAN |
重量(Kg) | 0.24 | 0.47 | 0.71 |
绝缘等级 | F | F | F |
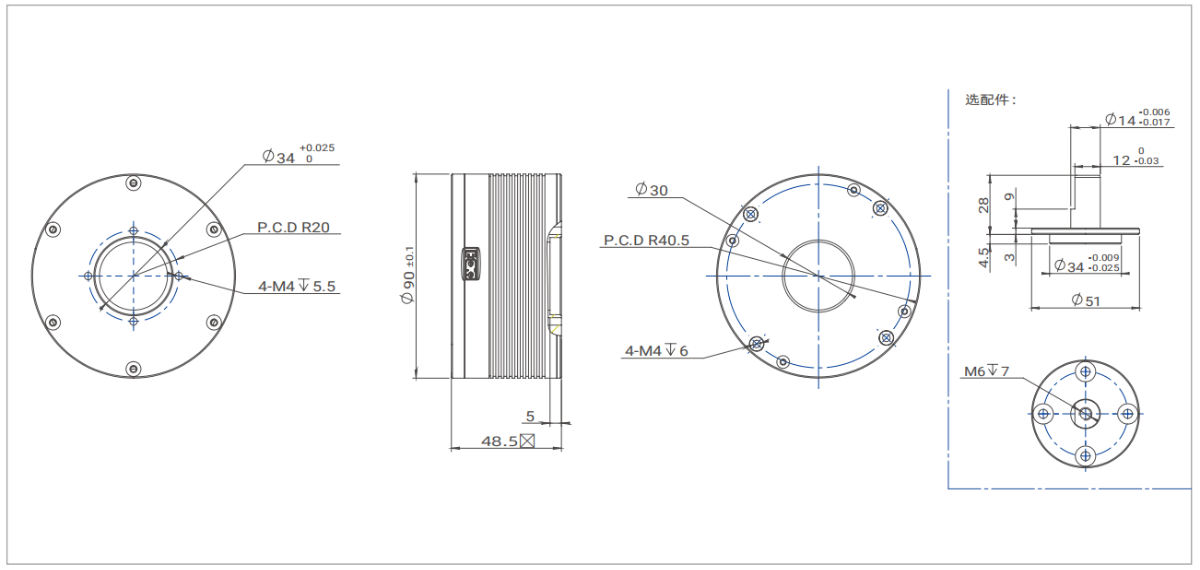
尺 寸 安 装 图
ER-50-15-100-C
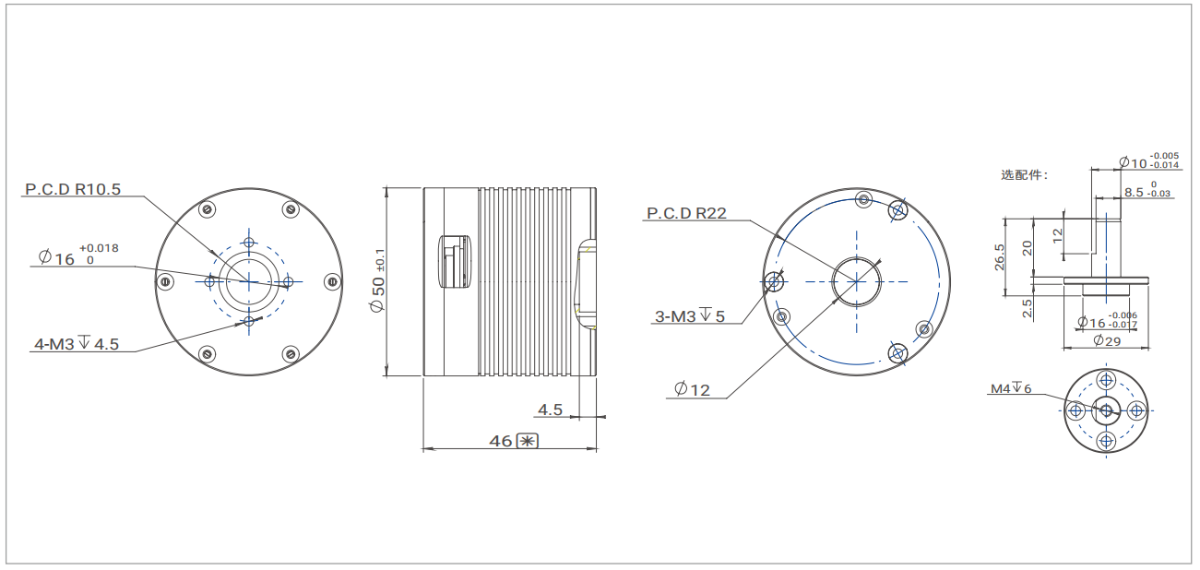
ER-70-15-200-C
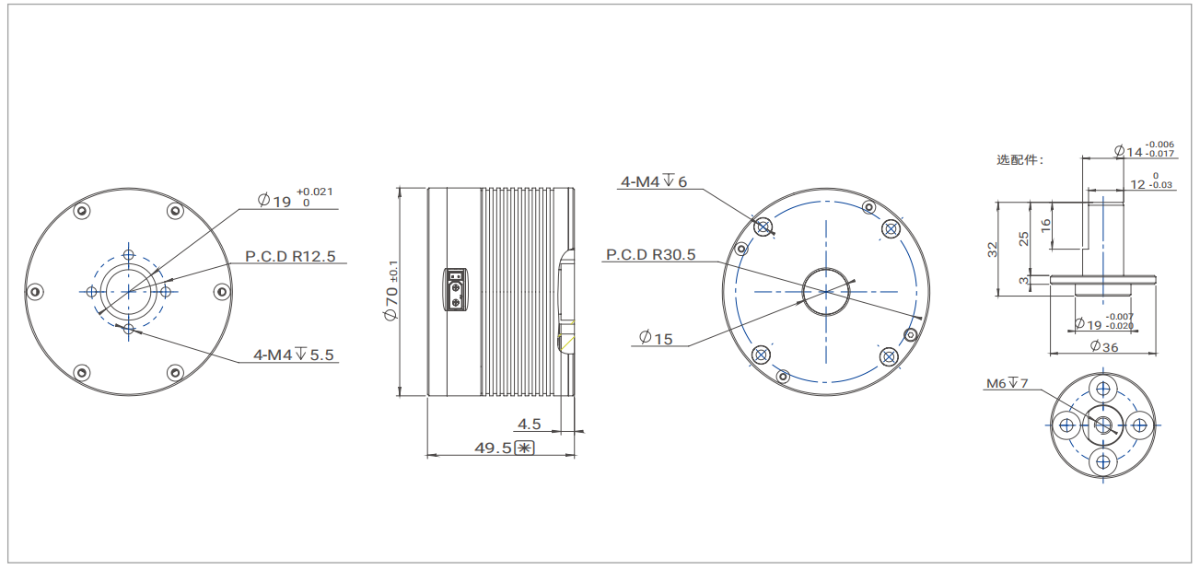
ER-90-15-400-C
常见问题
Q1:ER系列关节模组支持哪些通信协议?
A1:目前ER系列仅支持CANBUS通信协议,通信稳定、实时性强,适用于多节点控制系统。
Q2:是否支持EtherCAT或其他通信方式?
A2:目前暂不支持EtherCAT、Modbus或RS485等其他通信协议。如有定制需求,欢迎联系我们评估开发可行性。
Q3:ER系列适用于哪些类型的机器人?
A3:ER系列广泛应用于人形机器人、机械臂、四足机器人、外骨骼机器人、AGV搬运车、教育科研机器人等多自由度结构场景,特别适合对体积、重量、精度有较高要求的项目。
Q4:编码器的精度是多少?
A4:ER系列采用17-bit高精度编码器,单步控制精度可优于0.01°,满足精密动作控制需求。
Q5:该产品是否支持中空走线?
A5:是的,ER系列电机均采用中空结构设计,方便客户实现内部走线与传感器布线。
Q6:是否提供SDK或控制示例代码?
A6:我们提供基本通信协议说明文档与CANBUS通信的示例代码,支持用户快速开发与集成。
联系我们