


Product Description
19-bit dual encoder high-precision joint module, rated torque 6.6-9.6 Nm, fast dynamic response, accurate positioning, support high-load repetitive motion. High rigidity design, integrated dual encoder feedback, suitable for collaborative robots, industrial automation and precision transmission scenarios, taking into account performance and reliability.
Full hardware FOC drive,
20kHz high-speed real-time closed-loop control
Support EtherCAT/CANOpen Bus

Three-ring control frequency is all 20K
Fast response
16-bit ADC 1MHz sampling rate
Product parameters
Model | PH08 | PH11 | PH14 | PH17 | PH20 | PH25 |
Motor type | Internal rotor motor | |||||
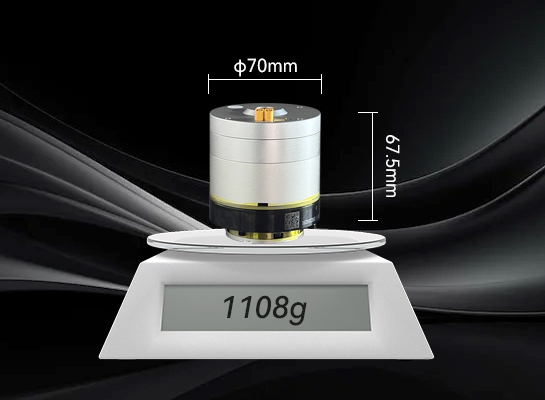
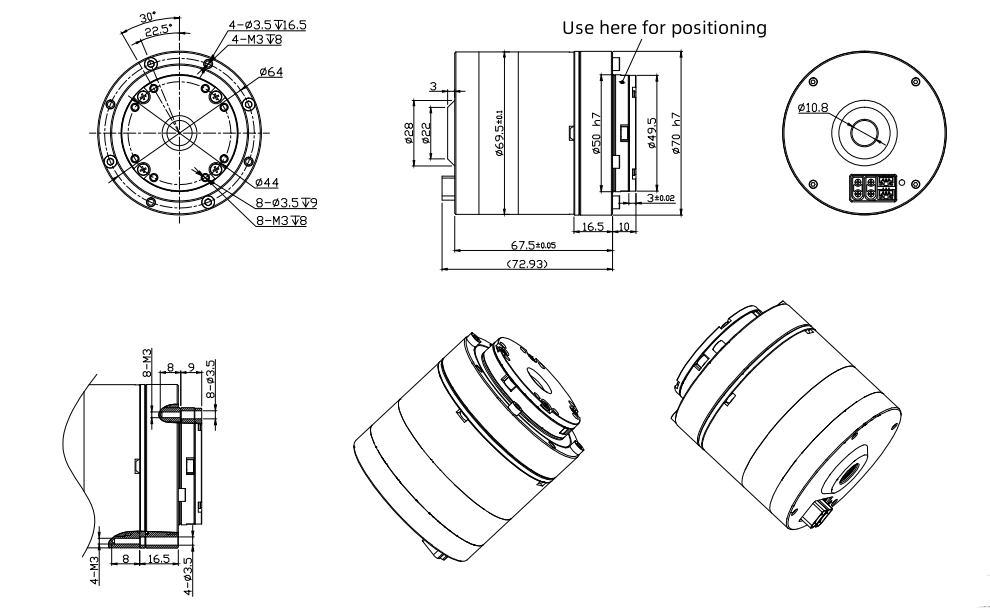
Diameter | 40mm | 52mm | 70mm | 80mm | 90mm | 110mm |
Hollow inner diameter | 4.4mm | 6mm | 10.8mm | 10.8mm | 13mm | 13mm |
Weight (without brake/with brake) | 185g/N | 450g/420g | 1080g/970g | 1350g/1250g | 1808g/1606g | 3130g/2927g |
Reverse backlash | 15arcsec | |||||
Noise | <<60 dB @30cm | |||||
Temperature range | -20~80°C | |||||
Operating voltage | 14v-42v | 24v-48v | ||||
Rated power | 38w | 500w | 80w | 170w | 210w | 270w |
Reduction ratio | 51/101 | 81/101/121 | ||||
Rated speed | 60/30rpm | 26/22/18rpm | ||||
Rated torque | 1.8/2.4Nm | 3.5/5Nm | 6.6/9.6Nm | 19.8/30Nm | 42/50/50Nm | 78/84/84Nm |
Start-stop peak torque | 3.3Nm/4.8Nm | 8.3/11Nm | 23/34Nm | 42-66Nm | 91/102/108Nm | 169/194/207Nm |
Average load maximum torque | 2.3/3.3Nm | 5.5/8.8Nm | 8.6/13.5Nm | 32/49Nm | 58/61/61Nm | 107/133/133Nm |
Instantaneous maximum allowable | 6.6/9Nm | 17/25Nm | 43/66Nm | 86/134Nm | 158/182/182Nm | 315/351/376Nm |
Encoder accuracy | 19bit | |||||
Encoder type | Double magnetic encoder | |||||
Electromagnetic brake | Power failure and lock | |||||
Communication protocol | EtherCAT/CANOpen Bus | |||||
PH14
Exploded View
This product adopts a highly integrated design, integrating FOC vector control drive unit, dual absolute encoder feedback system, high freight density frameless motor and precision freight mechanism.
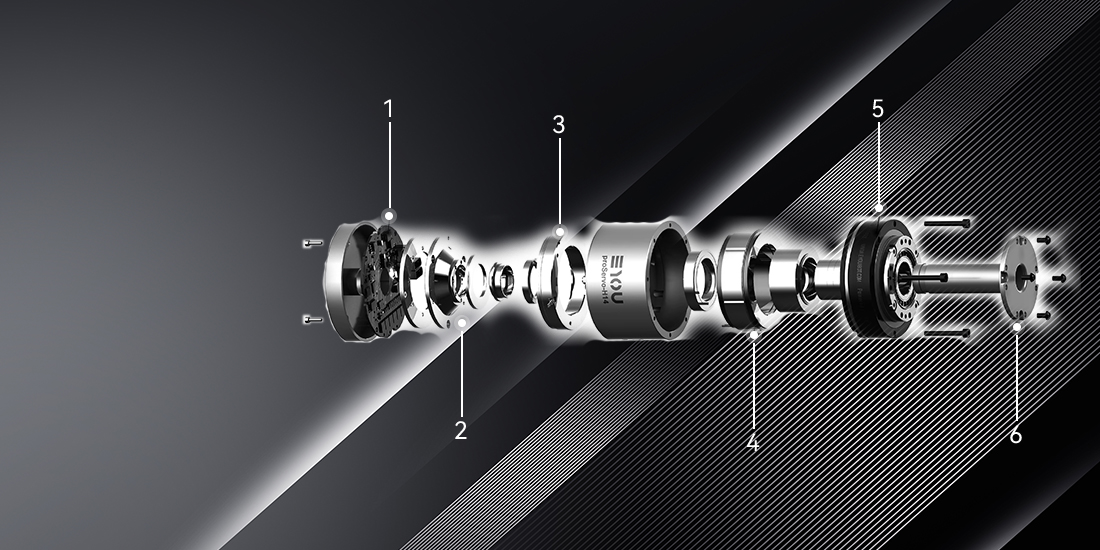
1. Full hardware FOC drive design,
20khz high-speed closed-loop calculation
2. High-precision dual magnetic encoder 19bit+19bit
3. Ultra-thin power-off brake
4. High-density torque motor
low cogging torque
5. High-precision harmonic reducer,
low noise, high precision
6. Full series hollow design,
the smallest hollow module outer diameter is 40mm
Software and support
The new generation of micro flexible servo joints
integrates high-precision reducers, high-energy density torque motors,
and high-performance drives.
The products have high integration, high precision, and stable performance,
and are particularly suitable for bionic robots, robotic arms, and other products.
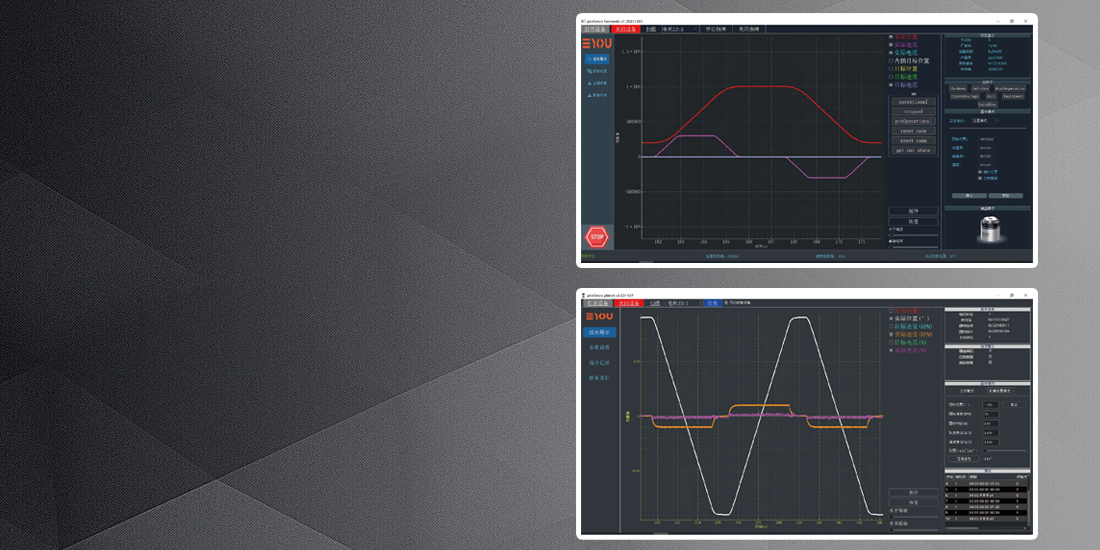
Provides UBUNTU and WINDOWS versions of the host computer
to facilitate users, to quickly verify. At the same time, it provides C/C++API,
which can integrate LINUX (ROS) WINDOWS systems
to achieve rapid mass production of products.
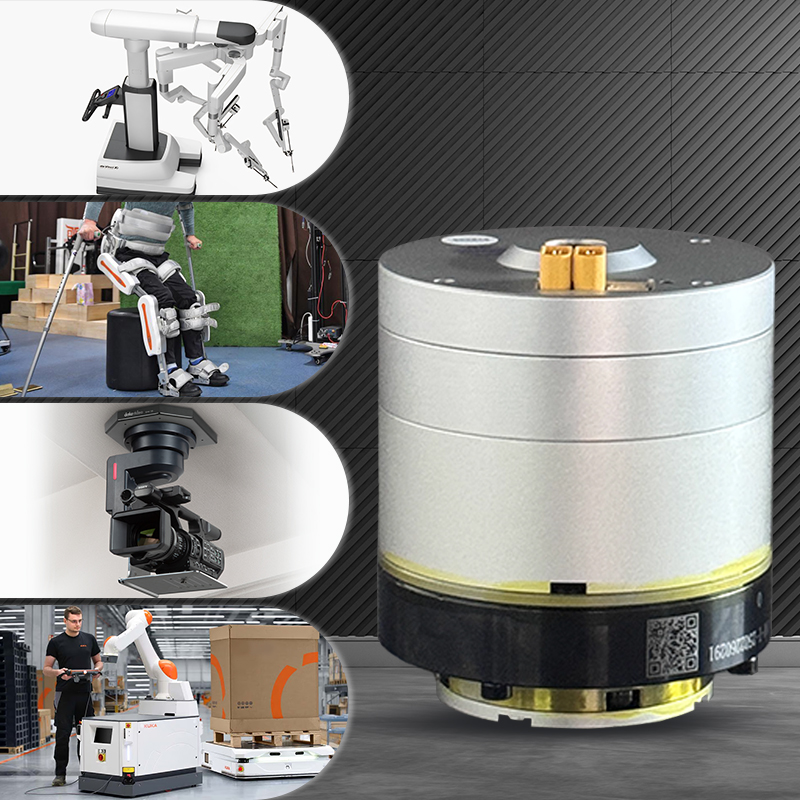
Application
Suitable for collaborative robot joints, precision automation equipment and coordinate industrial transmission to ensure stable movement and precise positioning.

Service
1. Is customization of the reduction ratio supported?
Support. We can provide customized solutions with different reduction ratios based on your application requirements.
The conventional reduction ratio range covers 51:1 to 121:1. The specific combination can be matched according to the load, speed and torque requirements.
2.What are the differences between the single-encoder and dual-encoder versions?
The single encoder version monitors the rotation at the motor end and is suitable for applications with general precision requirements. The dual encoder version simultaneously monitors the motor end and the output end, effectively compensating for backlash and elastic errors. It is suitable for high-precision control and applications with high safety requirements (such as collaborative robots and medical equipment). We offer 19-bit dual encoders
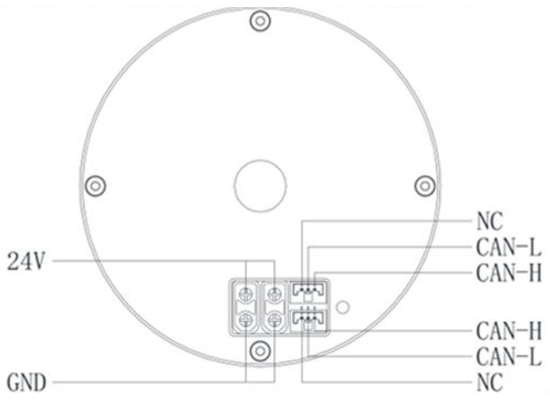
3. What communication interfaces can the joint module support?
The standard version supports analog control (current/voltage command) or pulse command control.
According to requirements, it can be optionally equipped to support CANOpen and EtherCAT protocols.
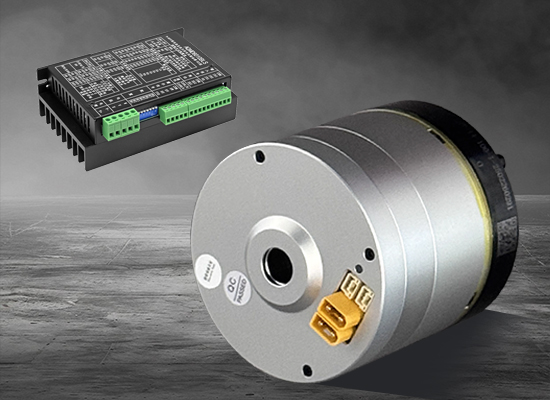
4. Does it support integrated drive and control? Can it be directly connected to the controller?
We offer an optional drive and control integrated joint module, featuring an integrated motor driver and position servo controller.
Users can directly control it through the bus or pulse interface without the need for an external independent driver, simplifying wiring and system integration.
5. Are there standard 3D model files available for download?
Yes. We provide 3D model files in STEP format for all models, facilitating customers to quickly integrate mechanical design.
If you need to obtain it, please contact our salesperson to get the download link or the data package.
6. Can the joint module be designed hollow? Can it be wired?
All models are designed with hollow shafts, and the central hole diameter can be used for wire routing, air pipe routing, water pipe routing, etc., facilitating the functional layout of complex end effectors.
For specific central aperture dimensions, please refer to the model selection table or consult customer service.
7. How long are the standard delivery time and the customized delivery time?
Delivery time for standard models: Usually 7 to 14 working days.
The delivery time for customized requirements (such as IP rating, reduction ratio customization, communication protocol customization, etc.) is determined by specific requirements, generally ranging from 5 to 10 weeks.
8. How long is the warranty period? How is the after-sales service?
All joint module products come with a 12-month warranty (under normal usage conditions).
We offer remote technical support, fault diagnosis guidance, and rapid spare parts supply services. Paid repair and maintenance services can also be provided outside the warranty period.
Contact Us