


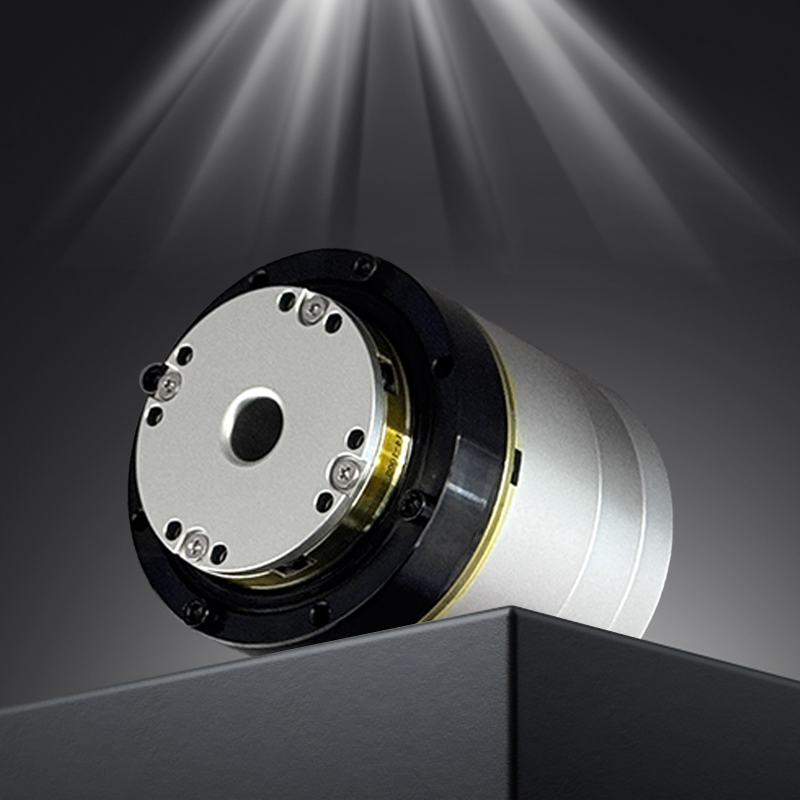
产品描述
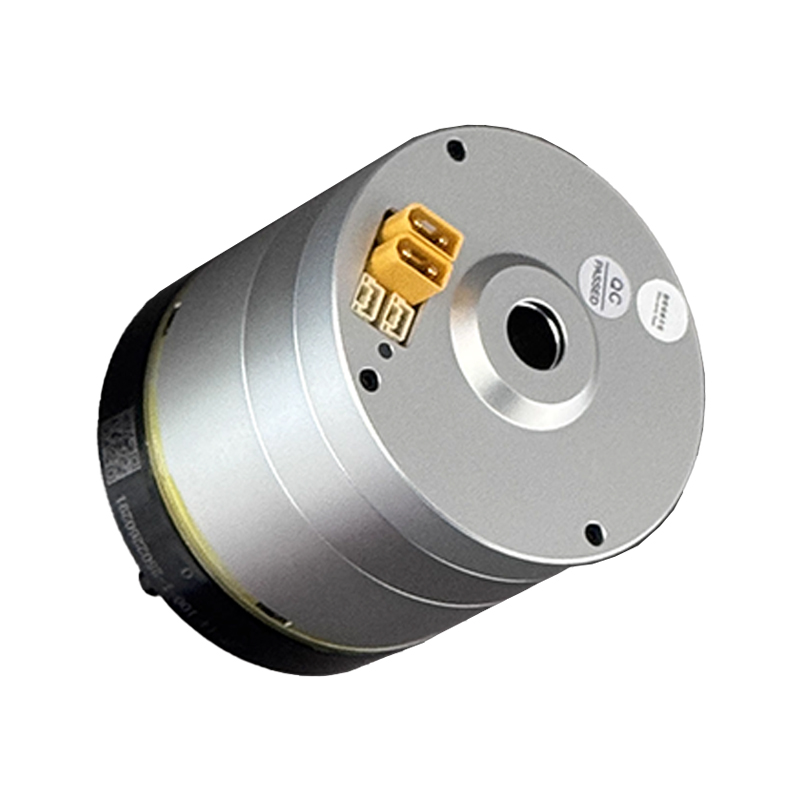
19bit双编码器高精度关节模组,额定扭矩6.6-9.6Nm,动态响应快,定位精准,支持高负载重复运动。采用高刚性设计,集成双编反馈,适用于协作机器人、工业自动化及精密传动场景,兼顾性能与可靠性。
全硬件FOC驱动设计
20khz高速闭环计算
支持EtherCAT/CANOpenBus

三环控制频率均为20K,响应速度快
16位ADC 1MHz采样率
产品参数
型号 | PH08 | PH11 | PH14 | PH17 | PH20 | PH25 |
电机类型 | 内转子力矩电机 | |||||
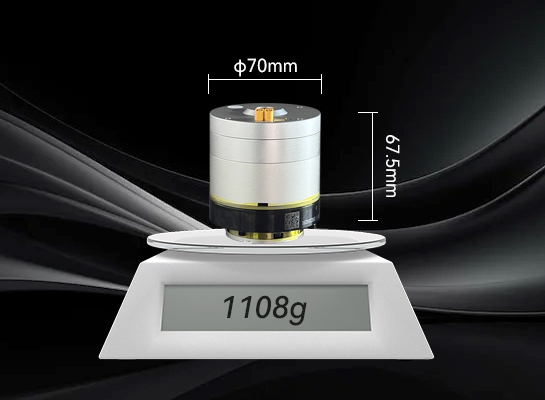
直径 | 40mm | 52mm | 70mm | 80mm | 90mm | 110mm |
中空内径 | 4.4mm | 6mm | 10.8mm | 10.8mm | 13mm | 13mm |
重量(无抱闸/有抱闸) | 185g/N | 450g/420g | 1080g/970g | 1350g/1250g | 1808g/1606g | 3130g/2927g |
反向背隙 | 15arcsec | |||||
噪音 | <<60 dB @30cm | |||||
温度范围 | -20~80°C | |||||
工作电压 | 14v-42v | 24v-48v | ||||
额定功率 | 38w | 500w | 80w | 170w | 210w | 270w |
减速比 | 51/101 | 81/101/121 | ||||
额定转速 | 60/30rpm | 26/22/18rpm | ||||
额定扭矩 | 1.8/2.4Nm | 3.5/5Nm | 6.6/9.6Nm | 19.8/30Nm | 42/50/50Nm | 78/84/84Nm |
启停峰值扭矩 | 3.3Nm/4.8Nm | 8.3/11Nm | 23/34Nm | 42-66Nm | 91/102/108Nm | 169/194/207Nm |
平均负载最大扭矩 | 2.3/3.3Nm | 5.5/8.8Nm | 8.6/13.5Nm | 32/49Nm | 58/61/61Nm | 107/133/133Nm |
瞬时允许最大 | 6.6/9Nm | 17/25Nm | 43/66Nm | 86/134Nm | 158/182/182Nm | 315/351/376Nm |
编码器精度 | 19bit | |||||
编码器形式 | 双磁编 | |||||
电磁抱闸 | 掉电抱闸 | |||||
通讯协议 | EtherCAT/CANOpen Bus | |||||
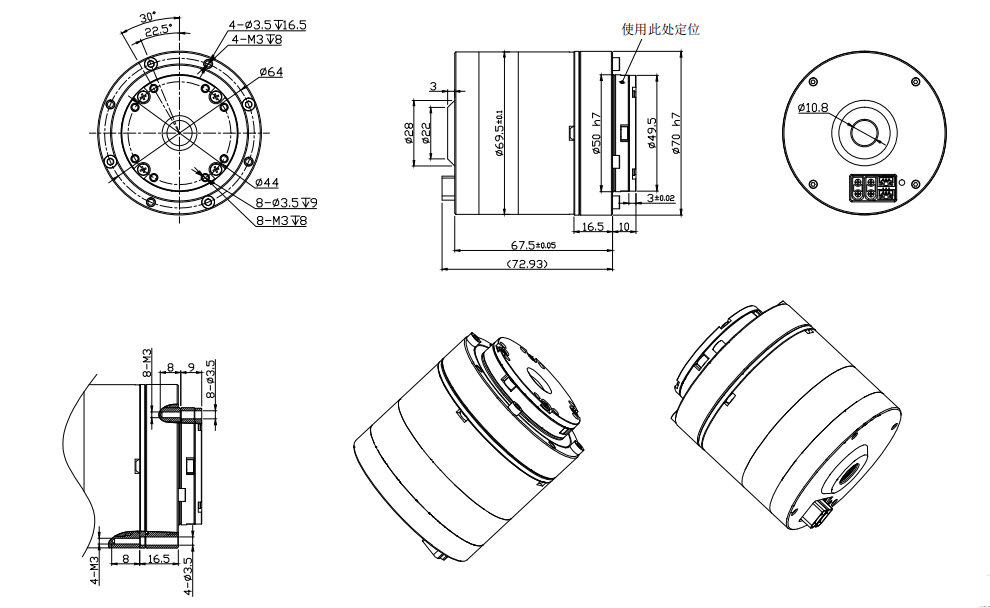
PH14
爆炸图
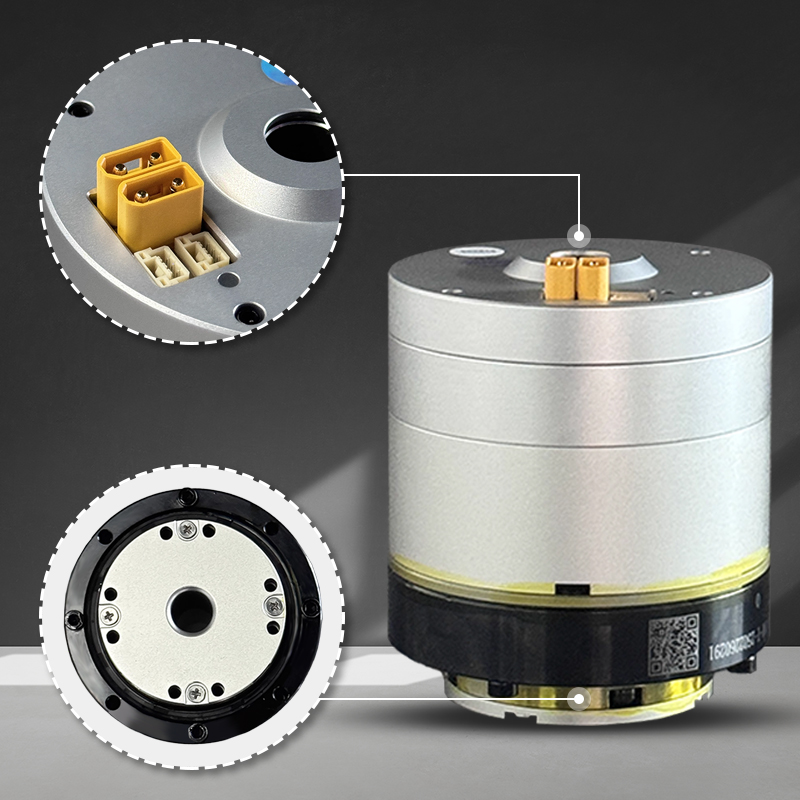
该产品采用高度集成化设计,集成了FOC矢量控制驱动单元、双绝对值编码器反馈系统、高扭矩密度无框力矩电机及精密谐波减速机构于一体。
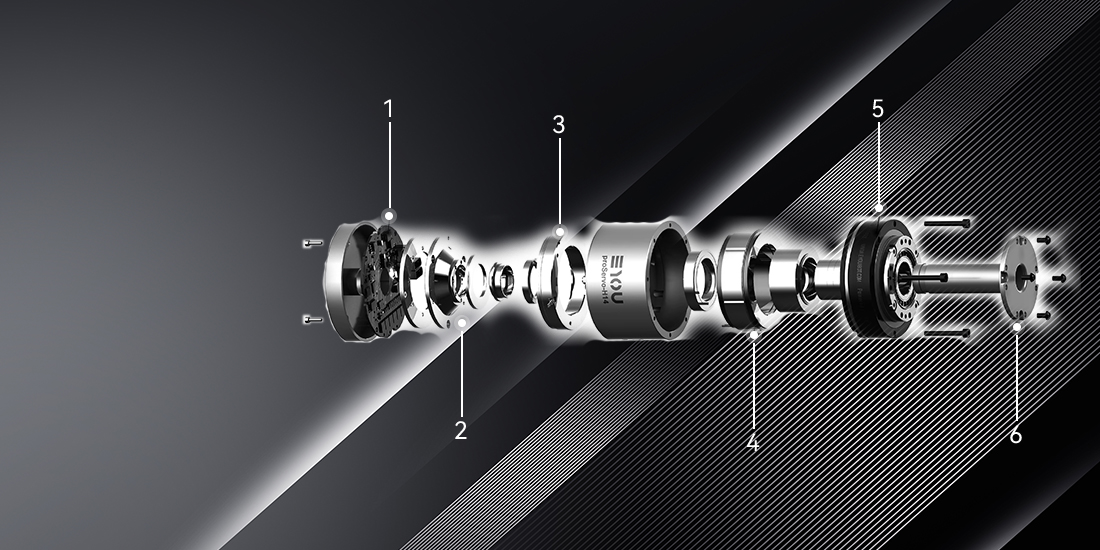
1.全硬件FOC驱动设计, 20khz高速闭环计算
2.高精度双磁编19bit+19bit
3.超薄掉电抱闸
4.高密度力矩电机, 齿槽转矩低
5.高精度谐波减速器, 噪音小、精度高
6.全系列中空设计, 最小的中空模组外径40mm
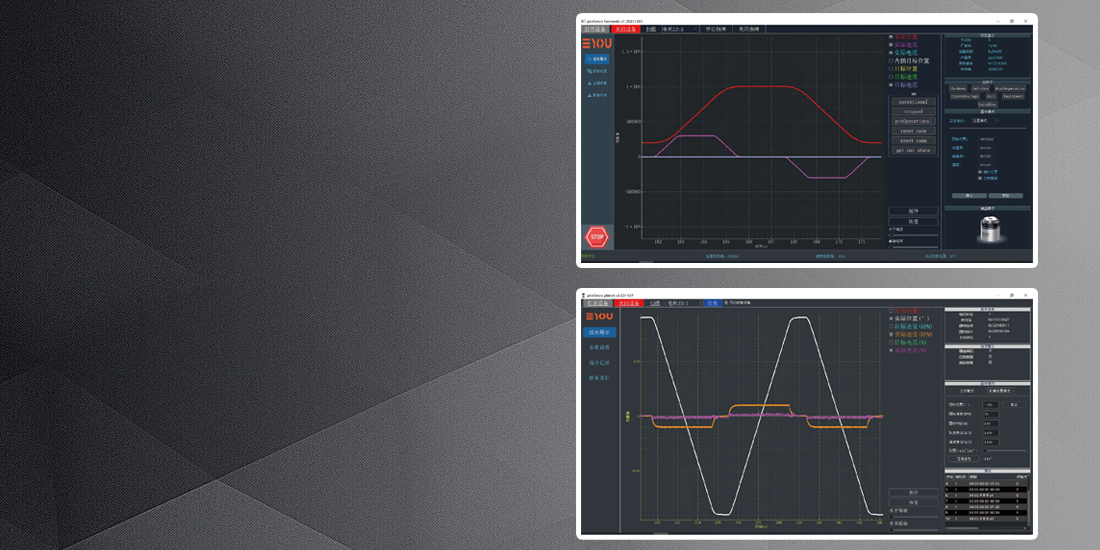
软件和支持
新一代微型柔性伺服关节,内部集成高精度减速器,高能量密度力矩电机,
高性能驱动,产品集成度高、精度高、性能稳定,
特别适用于仿生机器人、机械臂等产品。
提供UBUNTU和WINDOWS版上位机,方便用户快速验证。
同时提供C/C++API,可集成LINUX(ROS)WINDOWS系统,实现产品快速量产。
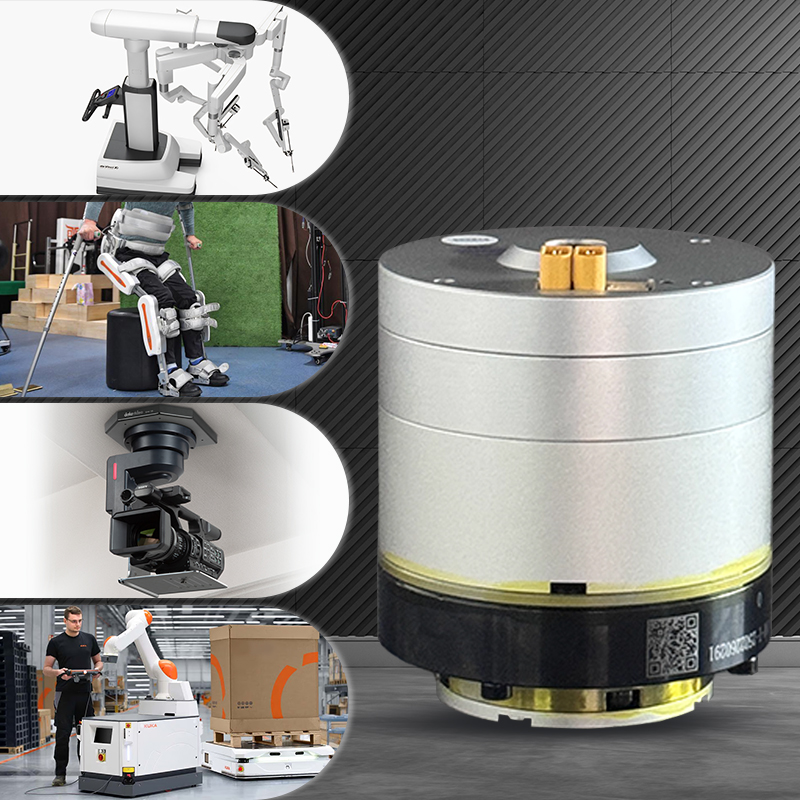
应用
适用于协作机器人关节、精密自动化设备及高精度工业传动,确保稳定运动与精准定位。

服务
1. 是否支持减速比定制?
支持。我们可以根据您的应用需求提供不同减速比的定制方案。
常规减速比范围覆盖:51:1 ~ 121:1,具体可根据负载、速度、扭矩要求匹配最佳组合。
2. 单编码器和双编码器版本有什么区别?
单编码器版本监测电机端转动,适用于一般精度要求场合;双编码器版本同时监测电机端和输出端,能有效补偿齿隙和弹性误差,适用于高精度控制和安全要求高的应用(如协作机器人、医疗设备)。我们提供19bit的双编码器
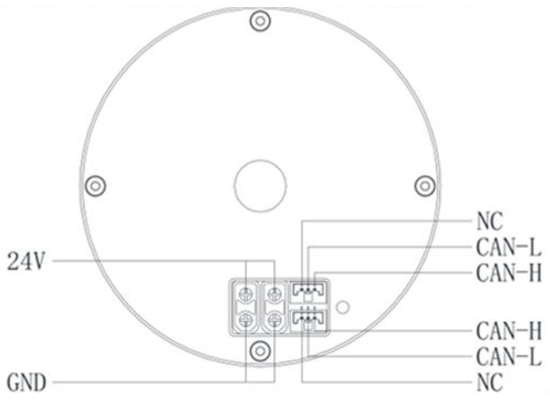
3. 关节模组可以支持哪些通讯接口?
标准版支持模拟量控制(电流/电压指令)或脉冲指令控制;
根据需求,可选配支持CANOpen Bus、EtherCAT协议。
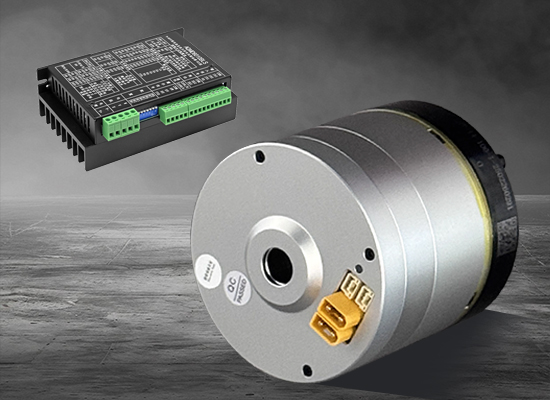
4. 是否支持驱控一体?可以直接连接控制器吗?
我们提供可选的驱控一体版关节模组,内置电机驱动器和位置伺服控制器,
用户可直接通过总线或脉冲接口控制,无需外接独立驱动器,简化布线和系统集成。
5. 有标准的3D模型文件可以下载吗?
有的。我们为所有型号提供STEP格式的三维模型文件,便于客户快速进行机械设计集成。
如需获取,请联系我们销售人员获取下载链接或资料包。
6. 关节模组是否可以空心设计?能走线吗?
所有型号为空心轴设计,中心孔径可用于走线、走气管、水管等,便于实现复杂末端执行器的功能布局。
具体中心孔径尺寸请参考型号选型表或咨询客服。
7. 标准交期和定制交期多久?
标准型号交期:通常为7-14个工作日。
定制需求(如IP等级、减速比定制、通讯协议定制等)交期根据具体要求而定,一般5-10周。
8. 质保期多长?售后服务如何?
所有关节模组产品提供12个月质保期(正常使用情况下)。
我们提供远程技术支持,故障诊断指导,以及快速备件供应服务。质保期外也可提供有偿维修和维护服务。
联系我们