










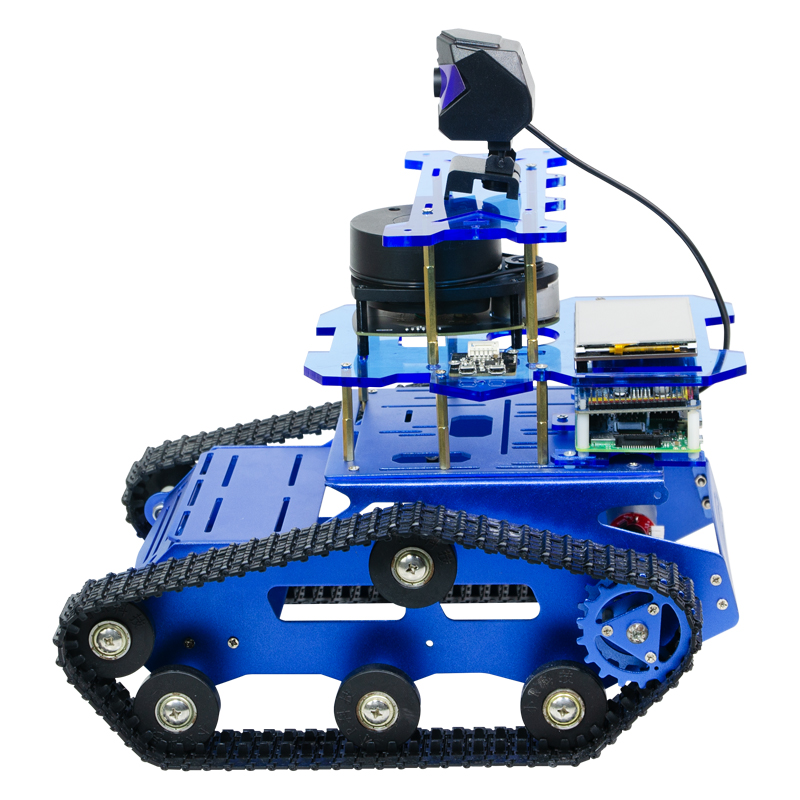


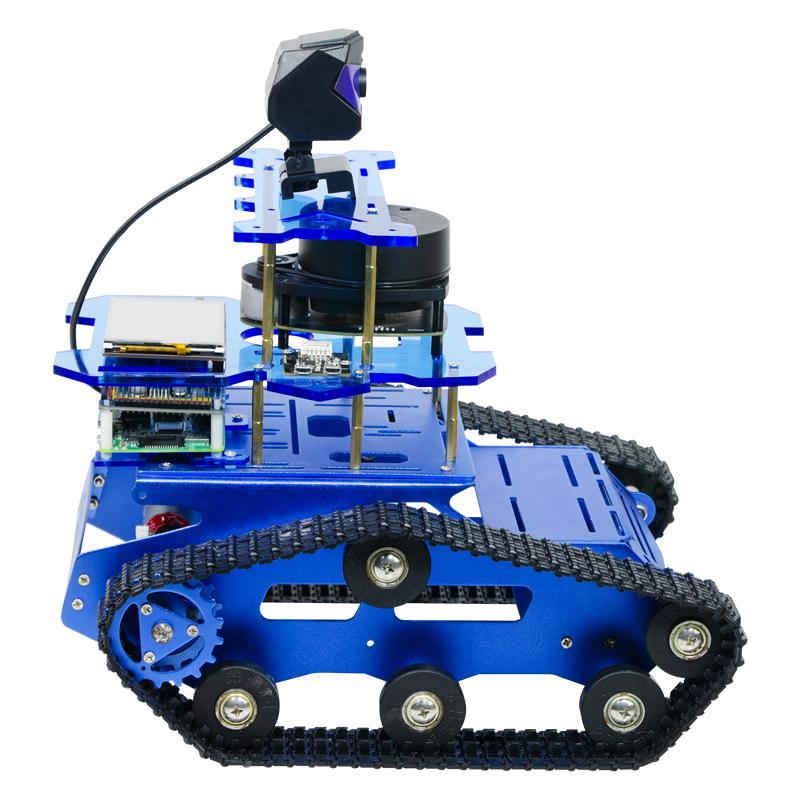
Product Introduction

XR-SLAM smart car is a smart car developed based on the open source ROS platform. This platform is one of the open source platforms that has become popular due to the development of artificial intelligence. It provides a series of program libraries and tools to help software developers create robot application software. It provides hardware abstraction, device drivers, function libraries, visualization tools, message passing and package management and many other functions. SLAM is a basic technology. At present, the robot has built-in HECTOR, GMAPPING, KARTO and other algorithms, and has made a series of applications based on map construction, such as navigation: the robot will plan a route on the map, and when obstacles appear on the planned route, it will perform dynamic obstacle avoidance and multi-point cruising. It is the best platform for unmanned driving and artificial intelligence.


Product characteristics
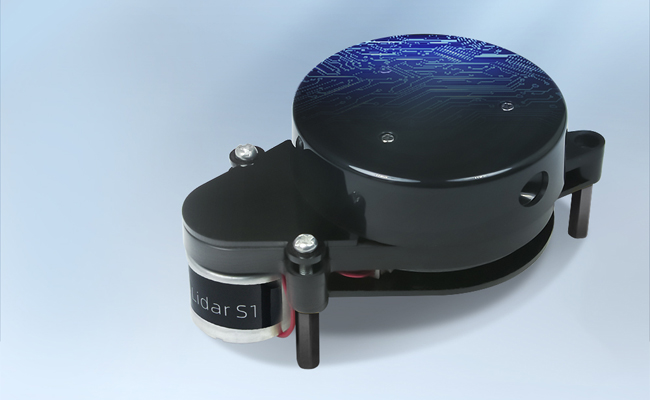
Laser scanning ranging radar
0.8m radius measurement range
360 degree scanning ranging
3860 times/second measurement frequency

SLAM algorithm
Laser triangulation technology
Easily scan buildings and build maps through SLAM algorithm
Application Cases



Technical Parameter
| Brushed DC motor (with 360-line AB encoding)ROS robot main control board | XR-ROS PT4 | Programming software | Python, C |
|---|---|---|---|
| Body size | 280mmx242mmx300mm | weight | About 3kg |
| Battery | 8400mAh lithium battery with charging protection | Digital voltage display | 3-segment digital display |
| Motor | Brushed DC motor (with 360-line AB encoding) | IMU | Nine-axis gyroscope sensor |






