










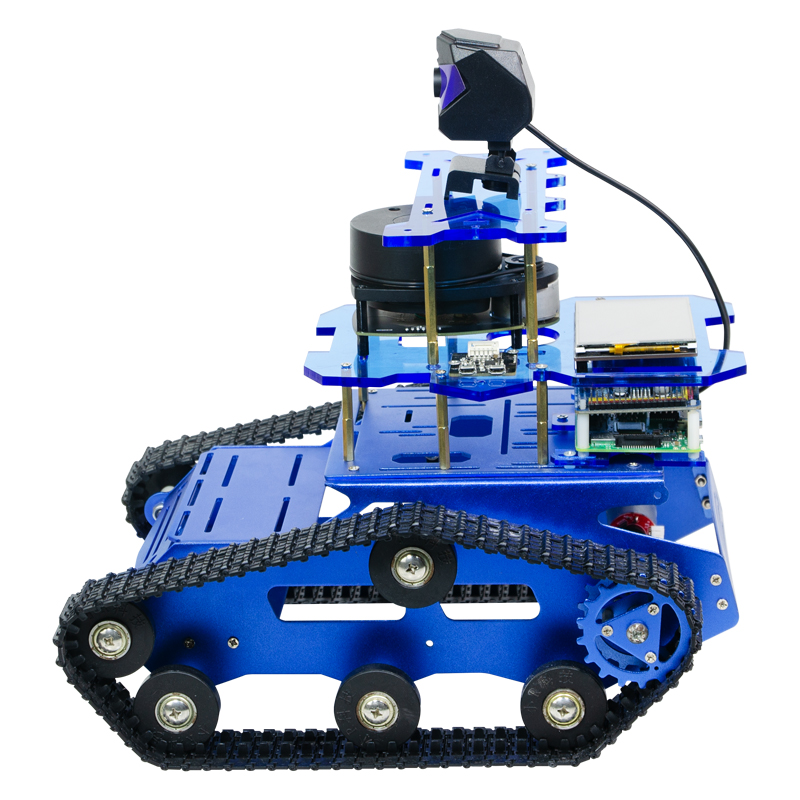

产品介绍

XR-SLAM智能小车是基于开源ROS平台开发的一款智能小车,此平台是目前人工智能发展而开始流行起来的开源平台之一,提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供硬件抽象,设备驱动,函数库,可视化工具,消息传递和软件包管理等诸多功能。SLAM作为一种基础技术,目前机器人内置了HECTOR,GMAPPING,KARTO等多种算法,并在建图的基础上做了一系列的应用,如导航:机器人会在地图上规划出路线,当规划的路线出现障碍物会进行动态的避障,以及多点巡航等。是做无人驾驶和人工智能最佳的平台。


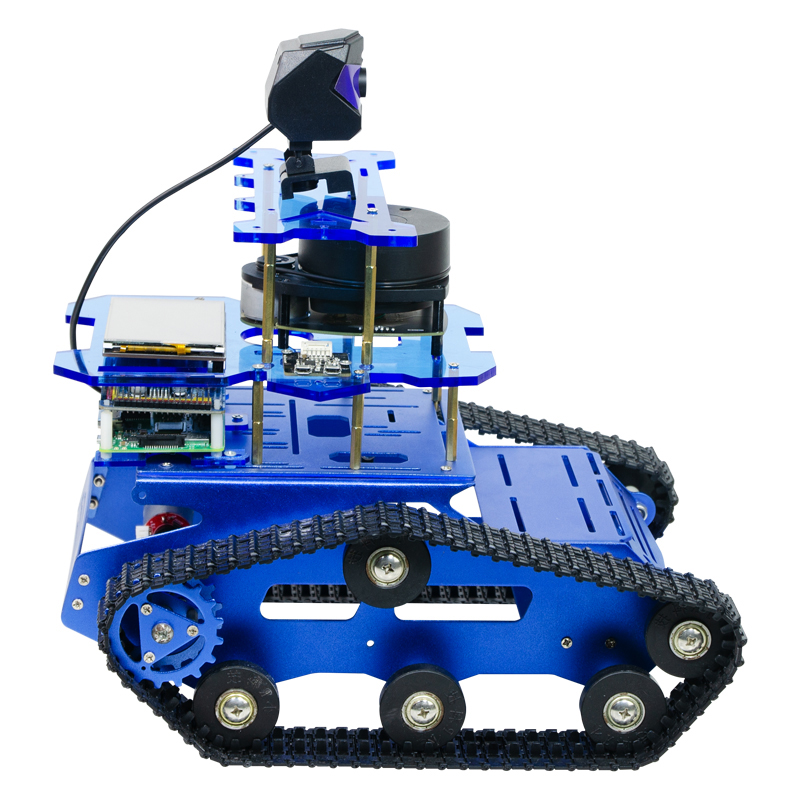
产品特性
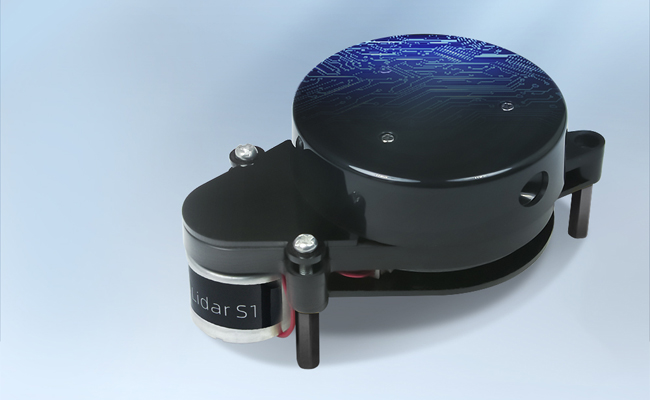
激光扫描测距雷达
08米半径测量范围 360度扫描测距 3860次/秒测量频率

SLAM算法
激光三角测距技术
通过SLAM算法轻松扫描建筑构建地图
应用案例
在行业应用方向,公司与中国航天、滴滴、比亚迪、优必选、唯酷光电等知名企业均有方案定制合作,产品形态涉及管道巡检机器人、远程定位系统、调光膜控制系统、道路监测系统、教育机器人等产品。
在教学细分领域,提供基于树莓派、Jetson Nano、Arduino、STM32、Micro:bit等开源平台的教学实训机器人产品定制开发与量产服务。产品形态包含车型机器人、仿生四足狗、仿生六足机器人、双足人形机器人等等,满足中小学、高校大学等用户的科普体验、实训教学、竞技竞赛需求。



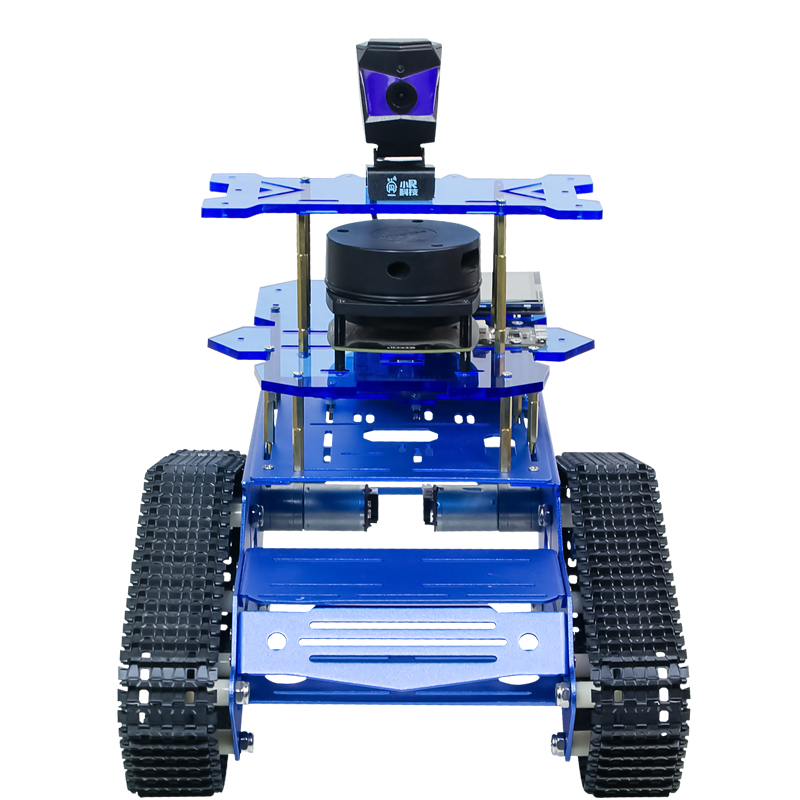
技术参数
| ROS机器人主控板 | XR-ROS PT4 | 编程软件 | Python、C语言 |
|---|---|---|---|
| 车体尺寸 | 280mmx242mmx300mm | 重量 | 3kg左右 |
| 电池 | 8400mAh带充电保护锂电池 | 数显电压 | 3段数显 |
| 电机 | 直流有刷电机(自带360线AB编码) | IMU | 九轴陀螺仪传感器 |






