














产品描述
超强形状自适应抓取:
可适应圆柱体、多面体、球体等不同形状的物体,表现出高度的通用性。这意味着在各种复杂的工作环境中,它都可以轻松处理不同形状的物品,提高工作效率。
这种自适应抓取能力或许源于其先进的传感器技术和精巧的机械结构设计。传感器感知物体的形状和大小,然后灵巧手可以自动调整抓取姿势和力度,确保稳定准确地抓取物体。



产品参数
| 自由度 | 7 |
| 夹持力 | 5-20N |
| 自重 | 0.98kg |
| *最大推荐负载 | 5kg |
| 工作电压 | DC24V±10% |
| 最大电流 | 3A |
| 功率 | 60W |
| 打开/关闭时间 | 不大于1s |
| 通讯协议 | Modbus RTU(RS485) |
| 驱动方式 | 伺服电机驱动 |
| 抓取方式 | 捏取、夹取、包络抓握 |
| 手指结构 | 三指 |
技术创新
已服务医疗自动化、锂电池、3C、半导体、食品等行业数十家标杆企业,特别是针对医疗行业试管开管、扫码等工序开发的夹持旋转一体电动夹爪,为医疗行业提供了完美的解决方案,做出了联系贡献。
产品展示

工业级灵巧手的运动是通过复杂的控制系统实现的。它接收来自上位机(如工业机器人的控制器)的指令,这些指令包括目标物体的形状、位置、抓取方式等信息。控制系统根据这些指令,通过电机或其他驱动方式,精确地驱动各个关节的运动。例如,当需要抓取一个具有不规则形状的机械零件时,控制系统会根据预先编程的算法,计算出每个手指关节需要转动的角度和运动的速度,从而使手指能够紧密地贴合零件的形状进行抓取。

其内部的传感器不断地感知周围环境和自身的状态。当手指接触到物体时,触觉传感器会将接触力的大小和方向等信息反馈给控制系统。控制系统根据这些反馈信息,实时调整手指的抓取力。如果接触力过小,可能会导致物体抓不住而掉落;如果接触力过大,则可能损坏物体。
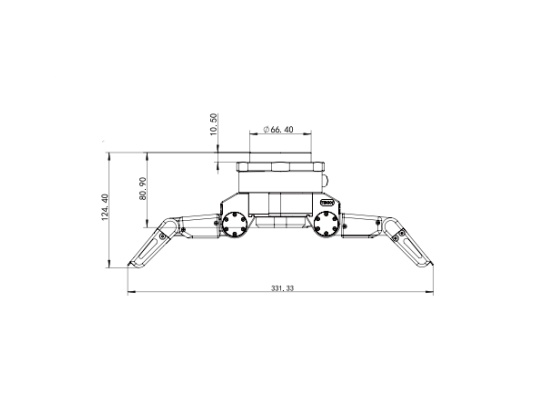
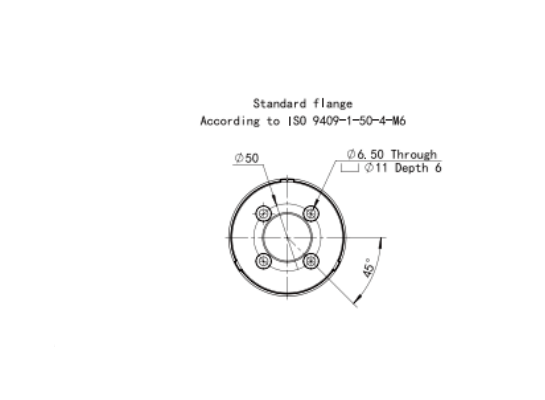
尺寸和接口
应用案例
工业级灵巧手在行业中催生出众多巨大应用潜力。
在物流行业中,工业级灵巧手可以实现高效的货物分拣和搬运,能够快速准确地抓取不同形状和大小的包裹,提高物流作业的效率和准确性。与传统人工作业相比,灵巧手具有更高的速度和准确性,可以降低人工成本和错误率。此外,灵巧手还可以在高温、低温、潮湿等恶劣环境下工作,确保物流作业的连续性。









