













产品描述
XR-ARM-A3 六自由度机械臂,是一款集先进技术与卓越性能于一身的工业利器。它具备灵活精准的六个自由度运动能力,可轻松完成复杂轨迹的操作任务,重复定位精度高。强大的负载能力使其能应对多种重量的工件,高速且稳定的关节运动确保高效作业。采用高品质材料打造坚固耐用的机身结构,搭配智能编程与控制系统,操作简便,可广泛应用于工业制造、科研实验、物流仓储等领域,为各行业的自动化升级提供可靠支撑,助力企业提升生产效率与竞争力。


产品参数
| 整体参数 | |||
|---|---|---|---|
| 产品名称 | XR六自由度机械臂 | 型号 | XR-ARM-A3 |
| 产品尺寸 | 270*110*260mm | 重量 | 940g |
| 抬举重量 | 500g | 材料 | 铝合金 |
| 表面面处理 | 阳极氧化 | 控制方式 | 运动学/逆运动学 |
| 供电方式 | XT30 | 通讯接口 | usart串行总线 |
| 自由度 | 6自由度 | 摄像头 | USB2.0 CAM RBG 1080P |
| 机械臂舵机参数 | |||
|---|---|---|---|
| 型号 | XRHS300 | 工作范围电压 | 8.4-12.6V |
| 静态电流 | 150mA | 电流 | 170mA |
| 速度 | 0.13ses/60° | 额定扭矩 | 0.37kgf·cm |
| 堵转电流 | 800mA | 堵转扭矩 | 25kgf·cm |
| 机械极限角度 | 360° | 操作角度 | 90°±10° |
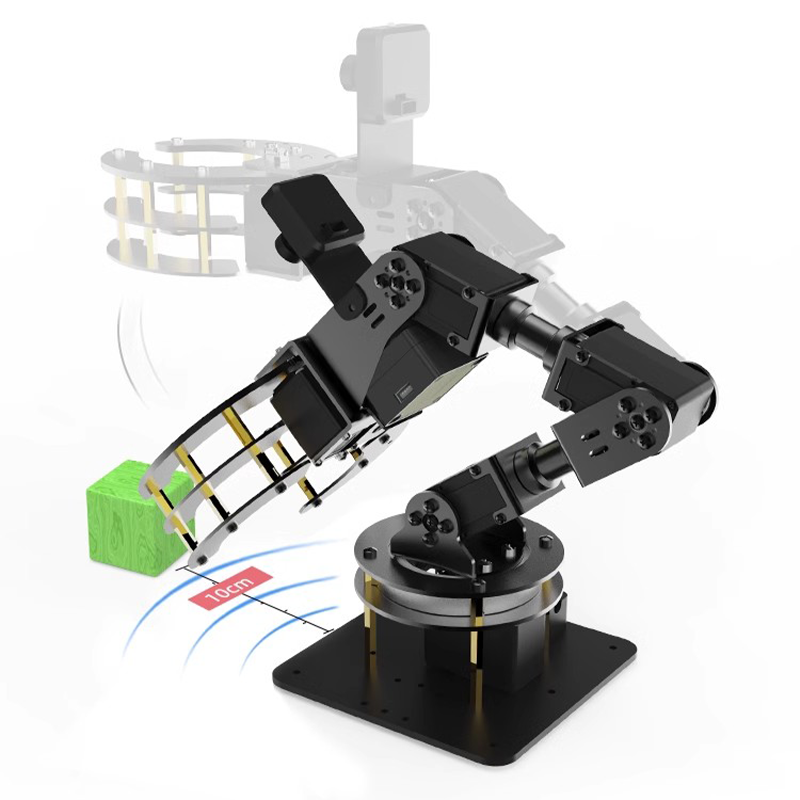
产品展示

- 高精度串行总线 伺服舵机
- 开源逆运动学算法 精确定位
- 起重重量达 500g
- 适配 “绝影” 机械狗 开箱即用
- Python语言SDK 调用方便
- 转动角度 精确

25KG高精度串行
总线伺服舵机
机械臂采用小R科技独有的6个高精度串行总线
伺服舵机(4关节+1水平旋转+1夹持器)
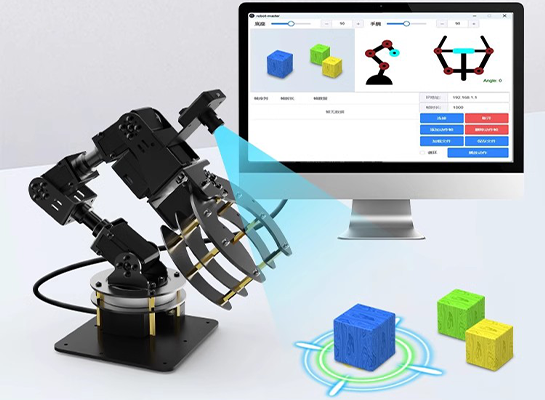
手眼合一
RGB摄像头
可通过USB接口接入主控,配合Jetson Nano、树莓派等嵌入式Linux系统可以方便地获取摄像头数据,并根据数据处理结果,驱动机械臂运动,实现“手眼合一”效果。
使用逆运动学算法
精确定位末端执行器
提供Python版本源代码,方便调用和二次开发
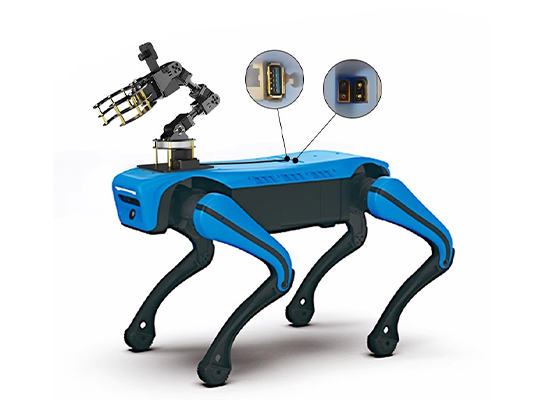
供电与摄像头接口
直接匹配机器狗接口
机械臂供电使用XT30接口,直接插到绝影机器狗背部的12V电源接口供电;
机械臂摄像头使用USB2.0接口,直接插到绝影机器狗背部的USB接口。
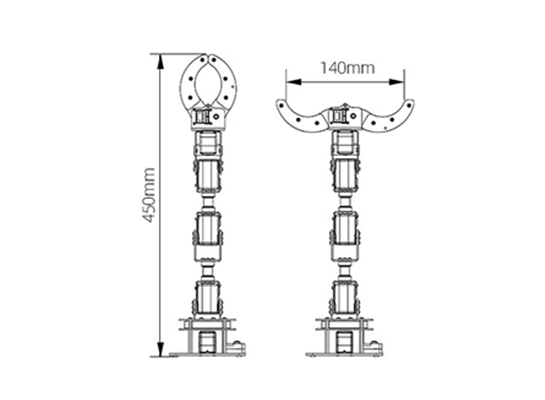
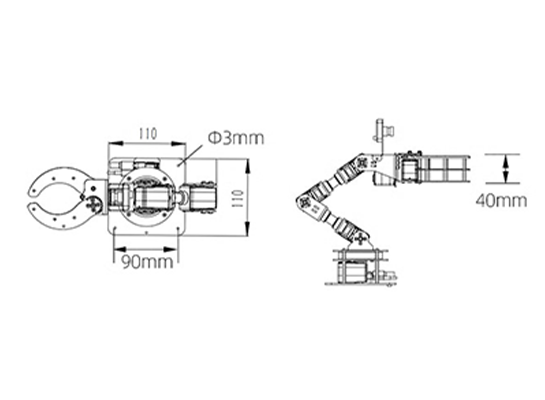
尺寸和接口
应用案例
在各类机器人大赛的舞台上,这款六自由度机械臂手爪搭配 RGB 摄像头并兼容绝影机器狗的组合大放异彩。在模拟工业生产场景中,机械臂的六个自由度使其能够灵活地模拟零部件的装配流程,精准地抓取和放置微小部件,RGB 摄像头则清晰捕捉零件位置和姿态信息,确保操作毫厘不差;在搜索救援模拟环节,机械臂手爪可快速抓取救援物资并精准投放到指定区域,摄像头及时扫描周边环境为绝影机器狗指引路径,助力其穿越复杂地形,三者紧密配合,高效完成任务,充分展示了其在复杂多变的比赛环境中的高度适应性和卓越性能,成为众多参赛队伍追求胜利的得力助手,也为机器人技术在实际应用中的发展提供了生动的实践样本。



服务
- 风电、市政、电力等行业应用管道视频巡检、排爆、勘察机器人软硬件产品解决方案定制开发和量产。
- 基于Micro:bit、树莓派等常见开源平台的教学实训软硬件产品定制开发和量产。
- 其他基于物联网技术的工控系统软硬件产品解决方案定制开发和量产(ODM、OEM)。






