


Product Description
Model: AQMD6030BLS-E2 |
|
The AQMD_BLS series motor driver adopts advanced precise motor current detection technology, self-speed measurement of inductive brushless motors, detection of the rotation position of inductive brushless motors, regenerative current constant current braking and acceleration control technology, and PID regulation technology to perfectly control the smooth forward and reverse rotation, reversing and braking of the motor. The output current is regulated in real time to prevent overcurrent. Precisely control the motor speed and rotation position, resulting in a short motor response time and low recoil force. | |

Product Features
◆ Voltage range: 9-60V, rated output current: 25A, maximum current: 40A(double current)/30A(non-double current); |
Principle Overview
This driver employs advanced motor current precise detection technology, self-speed measurement for inductive brushless motors, detection of the rotation position of inductive brushless motors, regenerative current constant current braking (or braking) technology, and powerful PID regulation technology to perfectly control the smooth forward and reverse rotation, reversing, and braking of the motor. The output current is regulated in real time to prevent overcurrent, precisely controlling the motor speed and rotation position. The motor has a short response time and a small recoil force.
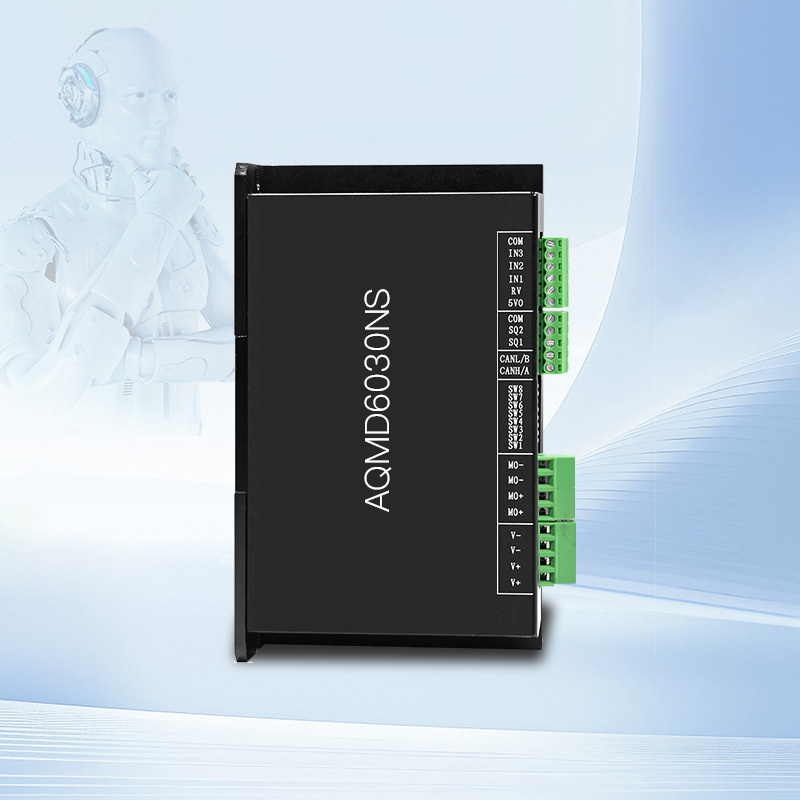
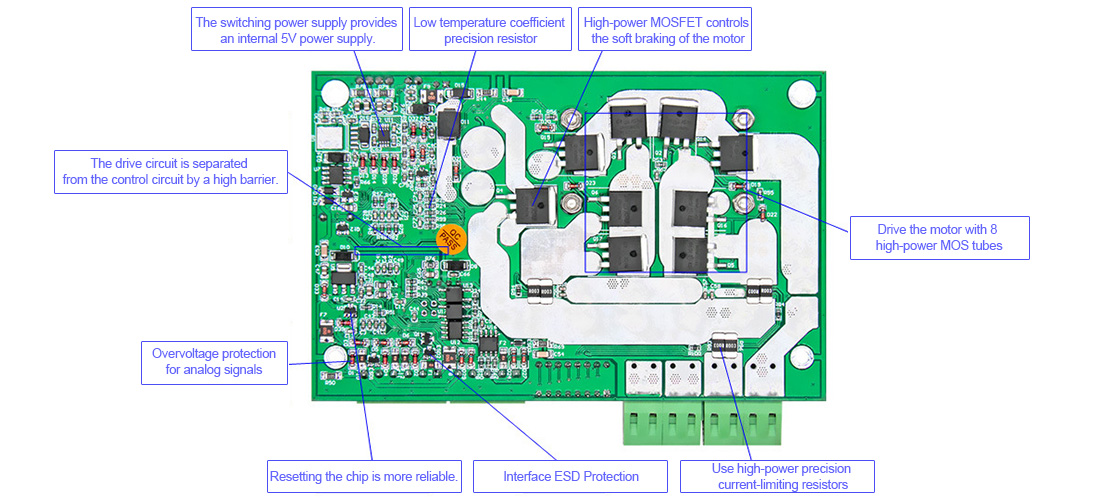
The front of the driver
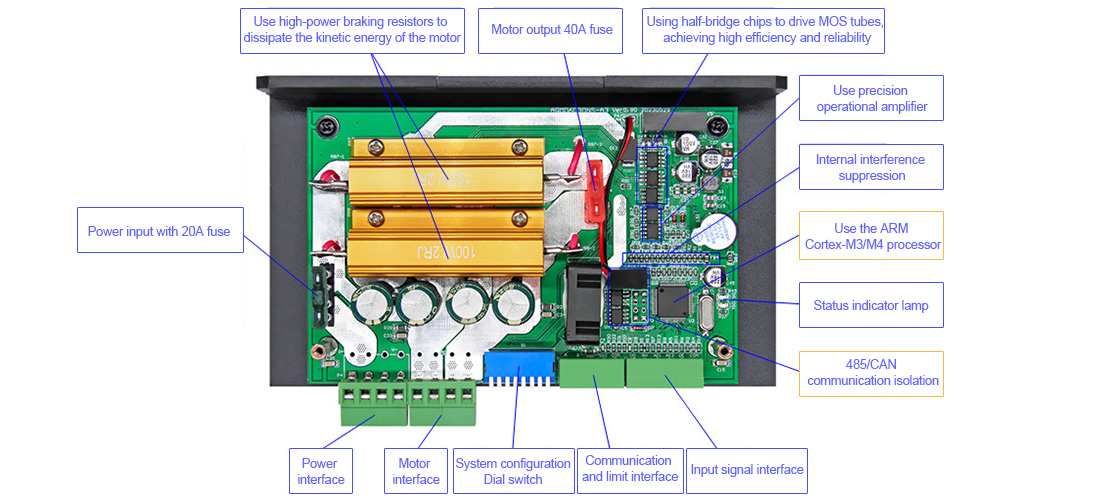
Back of the driver
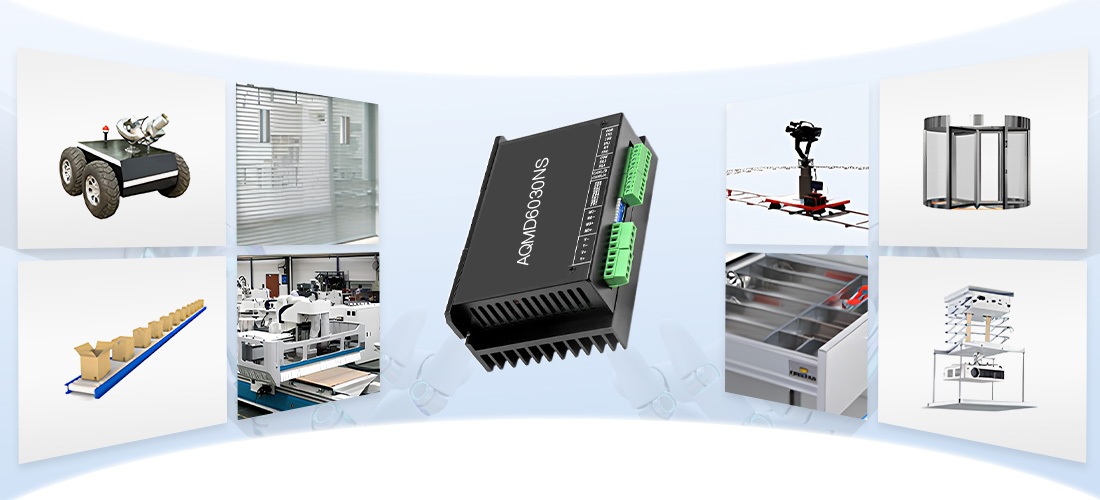
Application
Application scope: AGV intelligent carts, mechanical arms, passage
gates, food delivery elevators, service robots, warehouse robots, platform doors, various types of automatic control, etc
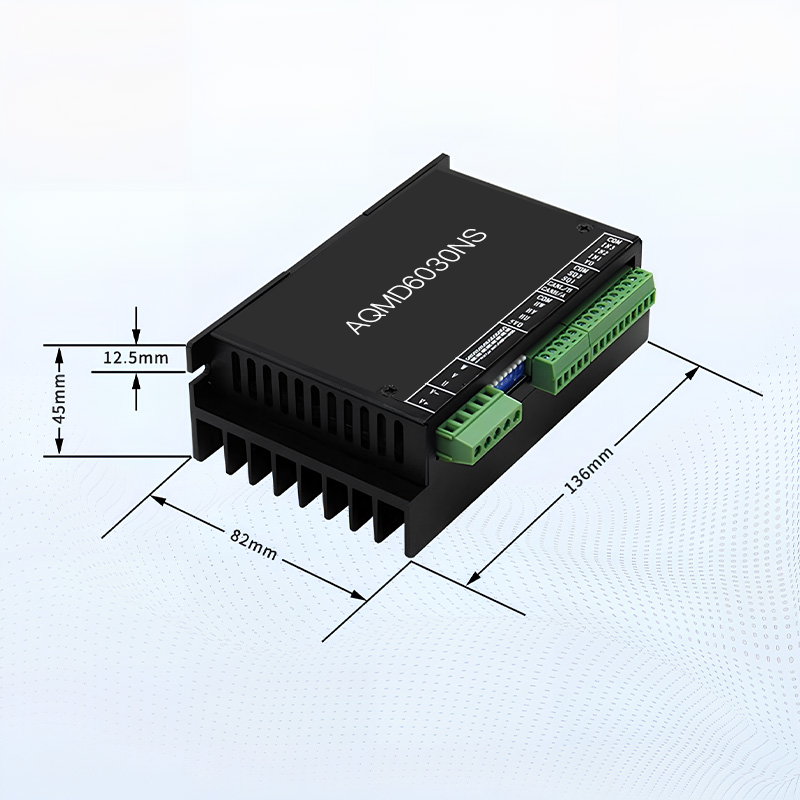
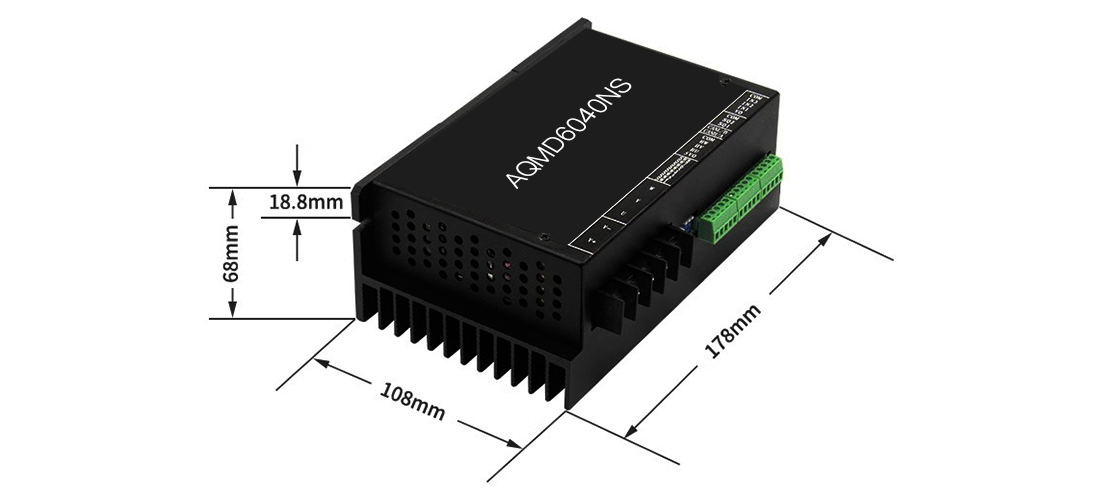
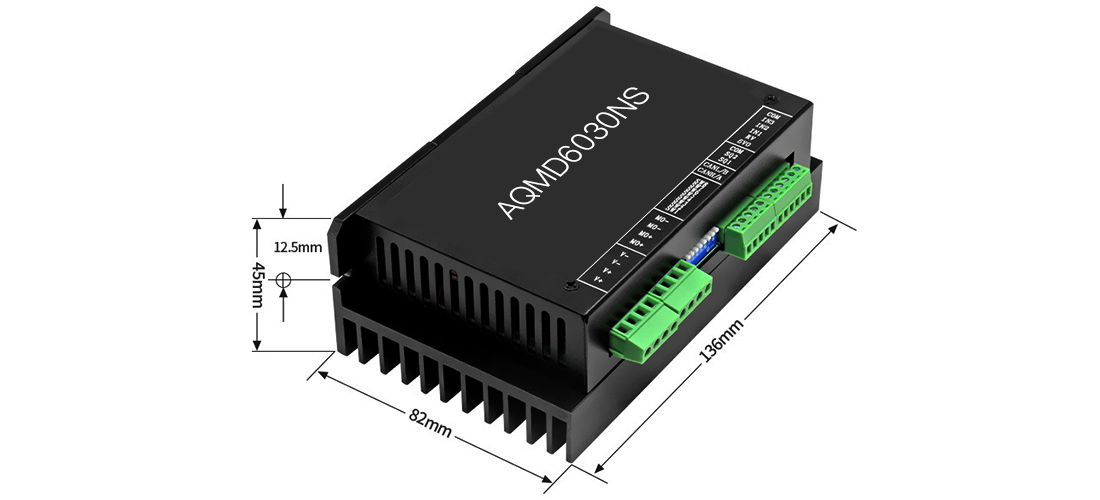
Dimensional drawing
Product parameters
Comparison project | 35A standard model | 485 Isolation Economic model | 25A Standard model | 25A Economy model |
Control signal type | Potentiometer, analog quantity, PWM, frequency, pulse, level, switch quantity, communication control | |||
Motor control mode | Duty cycle (open-loop) speed regulation, speed closed-loop, position closed-loop, and torque limit control | |||
Position control braking mode | Constant acceleration braking | Brake resistor energy consumption braking | Constant acceleration braking ensures more precise, stable and rapid positioning | |
Power supply voltage range | 9~60V | |||
Rated current | 35A | 30A | 25A | |
Maximum long-term current | 40A | 35A | 30A | |
Maximum multiplier output | 50A | 40A | ||
Maximum soft braking current | 20A | 12A | ||
Maximum matching motor | 60V~1650W | 60V~1450W | 60V~1250W | 60V~1250W |
Overload current limiting | Support | Support | Support | Support |
Blocked rotor shutdown | Support | Support | Support | Support |
Abnormal large current shutdown | Support | Support | Support | Support |
Short-circuit protection | Support | Full-speed support | Support | Support |
Internal temperature measurement / | Support | Support | Support | Support |
Overvoltage/undervoltage shutdown | Support | Support | Support | Support |
Communication interface protection | 485/CAN isolation, ESD | 485 isolation, ESD | 485/CAN isolation, ESD | 485/CAN common mode voltage |
Technical parameters
Project | Parameters |
Power input voltage | DC 9V - 60V |
Rated output current | 25A |
Maximum output current | 40A(Double Current output)30A(Non-double current output |
Maximum soft braking current | 12A |
Support the motor speed range | 0 to 20,000 RPM |
Number of output channels | Single path |
Potentiometer resistance value | 10K to 50K |
The voltage range accepted by the input signal interface | 0V to 25V(except for the fault/completion signal output port) |
Single-ended analog signal input voltage range | Any within the range of 0 to 10V |
Differential analog signal input voltage range | Any within the range of -3.3V to +3.3V |
Logic level voltage range | Any level within the range of 0 to 24V, including LvTTL,TTL,HvTTL,PLC, etc |
RS485/CAN communication parameter range | The 485 baud rate is 1200 to 115200 BPS, and the CAN baud rate is 10k to 1Mbps |
Support for Modbus | Supports Modbus-RTU, supports 03H, 06H, and 10H function codes, and can configure the slave station address range from 1 to |
Current detection resolution | 128. Support broadcasting |
Constant flow control accuracy | 0.04A |
Duty cycle speed regulation range | -100.0%~0,0~100.0% |
Stable speed control adjustment range | -3276.8Hz~3276.7Hz |
Position control adjustment range | -2147483648~2147483647 |
Torque control adjustment range | 0.5A~30A |
The setting range of instantaneous overcurrent turn-off current | 0~120A |
The range of the current multiplier can be set | 1.00~2.00 |
The multiplier time can be set within a certain range | 0.1S~99.9S |
Temperature measurement range | -40℃~125℃ |
Effective detection range of voltage | 8~70V |
Limit control | Support; Two external limit switches can be connected for limit or locked rotor time limit |
Soft start/soft braking | Support; Current-limited start, braking, and setting of acceleration and deceleration time as well as acceleration are available |
Overcurrent/locked rotor protection | Support; Overcurrent time-limited current output The machine can be shut down when the rotor is blocked |
Reverse power connection protection | Built-in 30A fast-melt fuse reverse connection protection |
Output short-circuit protection | Support; Instantaneous high current detection and built-in 30A fast-melt fuse protection |
Braking action time | Soft braking usually takes 0.1 seconds to 0.3 seconds |
Working temperature | -30℃~70℃ |
External dimensions | 136mm×82mm×45mm |
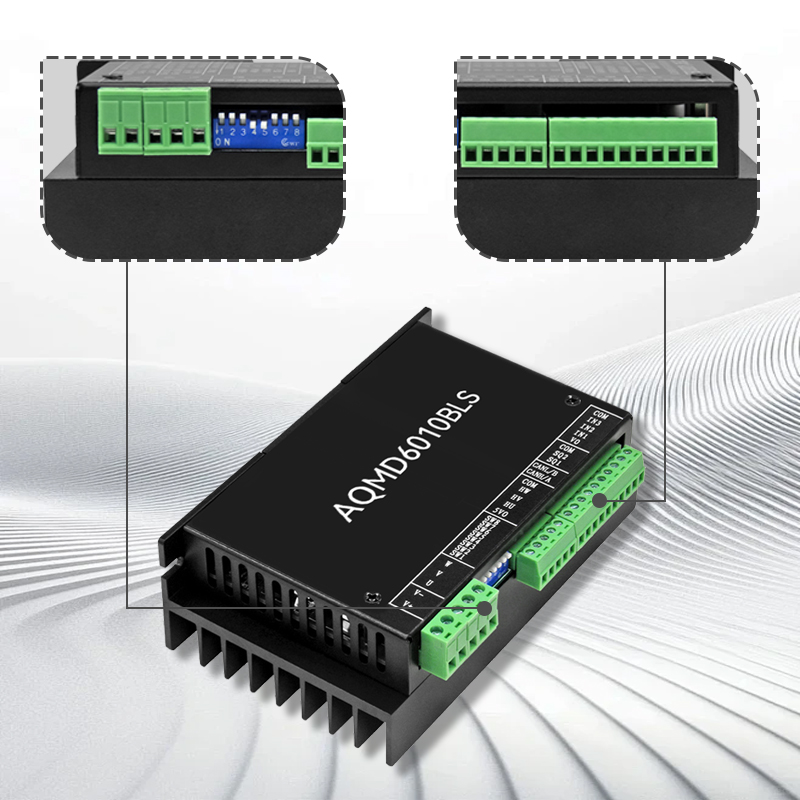
Configuration of dip switches
1、Function definitions of each position of the dip switch under potentiometer/analog signal control mode | ||||||||
The 1st to 3rd places | The 4th place | The 5th to 7th positions | The 8th place | |||||
Motor rated current configuration | Idle rotation time configuration | Selection of speed regulation mode | For the control mode position, please set it to 0FF for digital/analog signal mode | |||||
2. Motor rated current configuration under digital/analog signal control mode | ||||||||
The first place | The second place | The third place | The 8th place | Rated current value of the motor | ||||
OFF | 0FF | OFF | OFF | The rated current with 485 configuration is 24.5A by default | ||||
ON | OFF | OFF | OFF | 12A | ||||
OFF | ON | OFF | 0FF | 15A | ||||
ON | ON | OFF | OFF | 18A | ||||
OFF | 0FF | ON | 0FF | 21A | ||||
ON | 0FF | ON | OFF | 24A | ||||
0FF | ON | ON | 0FF | 27A | ||||
ON | ON | ON | OFF | 30A | ||||
3. Locked-rotor time configuration under digital/analog signal control mode | ||||||||
The 4th place | The 8th place | Idle rotation time | ||||||
OFF | OFF | When using the 485 configuration for locked rotor time, the default locked rotor braking (braking) is not performed. | ||||||
ON | 0FF | After blocking the rotor for 1 second, apply limit braking (braking). | ||||||
4. Speed regulation mode configuration under digital/analog signal control mode | ||||||||
The 5th place | The 6th place | The 7th place | Speed regulation mode | |||||
0FF | OFF | OFF | Single potentiometer/single-ended analog /PWM/ frequency signal duty cycle speed regulation | |||||
ON | 0FF | OFF | Dual potentiometers/dual single-ended analog/dual PWM/ dual frequency signal duty cycle speed regulation | |||||
OFF | ON | OFF | Duty cycle speed regulation of -3.3V to +3.3V differential analog signals | |||||
ON | ON | OFF | Dual potentiometers/dual single-ended analog/dual PWM/ dual frequency signal torque control (constant current) | |||||
0FF | OFF | ON | Single-potentiometer/single-ended analog /PWM/ frequency signal self-speed measurement closed-loop speed regulation (constant speed) | |||||
ON | OFF | ON | Dual potentiometers/dual single-ended analog/dual PWM/ dual frequency signal self-speed measurement closed-loop speed regulation (constant speed) | |||||
0FF | ON | ON | Single-potentiometer/single-ended analog /PWM/ frequency signal external speed measurement closed-loop speed regulation (constant speed) | |||||
ON | ON | ON | 485 pre-set forward and reverse rotation speeds/custom process control | |||||
5. Function definitions of each dip switch under 485/CAN communication control mode | ||||||||
The 1st to 7th positions | The 8th place | Control mode | ||||||
All are 0N | ON | Default communication parameter control mode | ||||||
Slave station address/node ID | ON | RS485/CAN communication control mode | ||||||
Typical usage
1、The connection method of single potentiometer duty cycle/closed-loop speed regulation point control
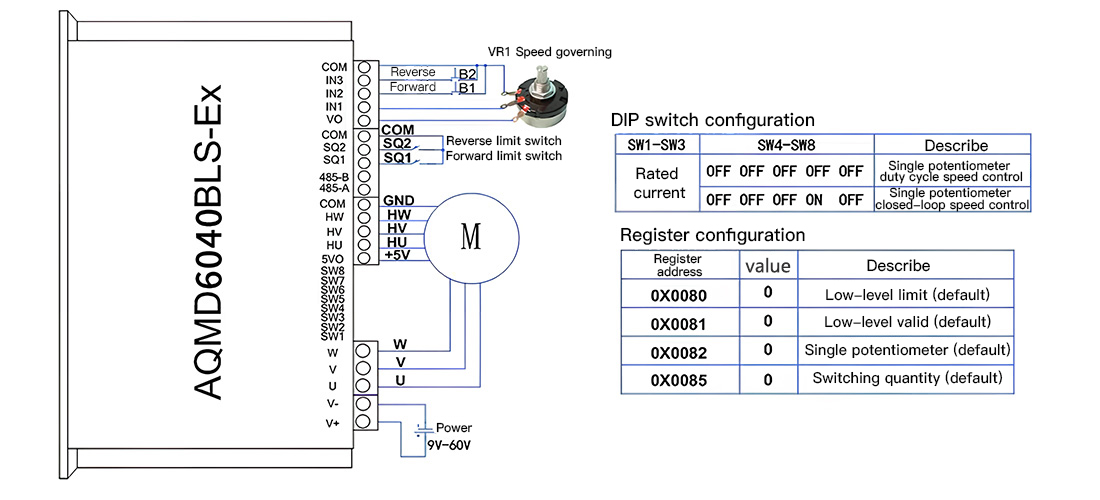
The working process of the point control mode using potentiometer speed regulation is as follows: Press B1, the motor rotates forward, and the speed regulation is carried out using the potentiometer. B1 bounces up and the motor stops. When the motor stops after the forward rotation limit, pressing B1 again is ineffective. Press B2 to reverse the motor. Use the potentiometer to adjust the speed. B2 bounces up and the motor stops. When the reverse limit is applied, the motor stops. Pressing B2 again is ineffective.
2. The connection method of duty cycle/closed-loop speed regulation of PLC analog signals
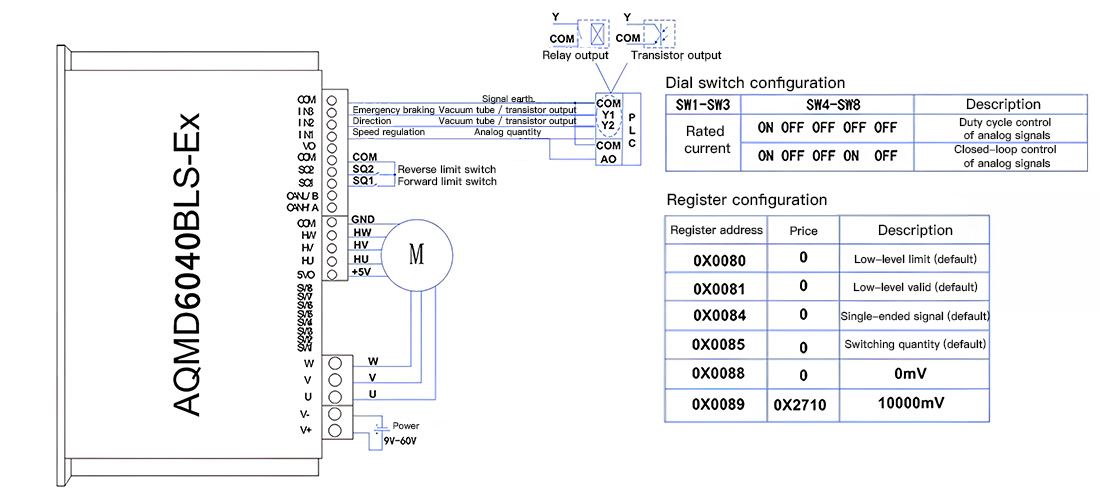
The working process of this connection method is as follows: IN1 is connected to the AO port of the PLC for speed regulation; IN2 and Y2 of PLC control the direction of the motor. IN3 is connected to Y1 of the PLC to control the emergency stop of the motor.
3. The connection method of duty cycle/closed-loop speed regulation of the PWM signal of the single-chip microcomputer
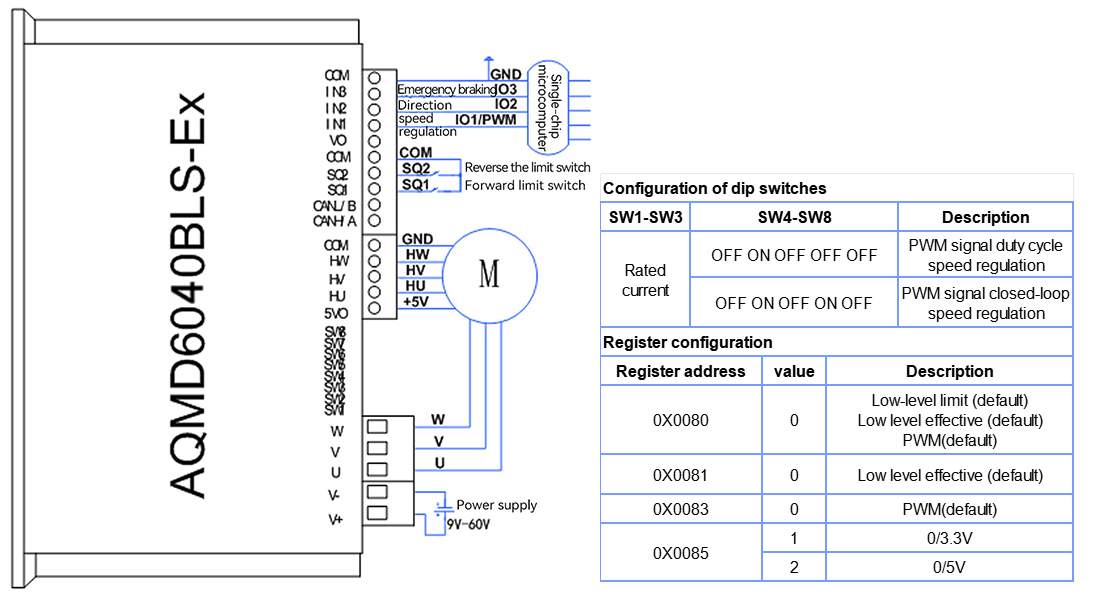
The working process of this connection method is as follows: The power supply of the single-chip microcomputer is grounded to the COM port of the drive module. Pin IN1 is connected to the PWM output of the single-chip microcomputer for speed regulation. IN2 and IN3 are connected to the two IOs of the single-chip microcomputer to control the forward and reverse rotation of the motor and emergency braking.
4. Connection method of pulse signal position control for single-chip microcomputer
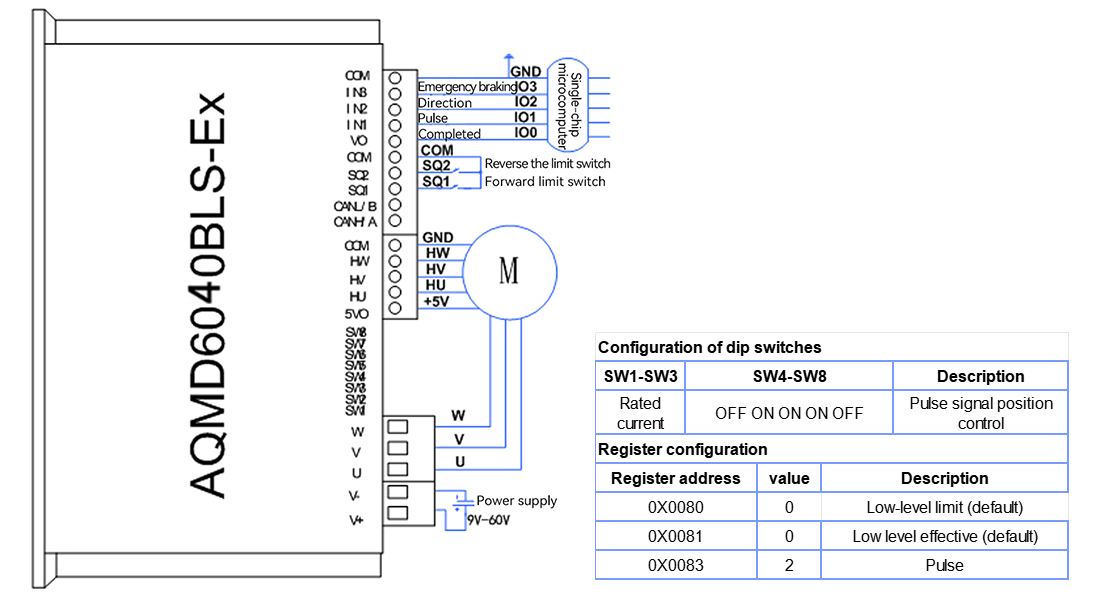
The working process of this connection method is as follows: The power supply of the single-chip microcomputer is grounded to the COM port of the drive module. IN1 is connected to IO1 of the single-chip microcomputer to determine the number of pulses, which is used for motor position control. VO is connected to IO0 of the single-chip microcomputer and is used to complete signal control. IN2 and IN3 are connected to the two IOs of the single-chip microcomputer to control the forward and reverse rotation of the motor and emergency braking.
5. Connection method for 485 multi-site control
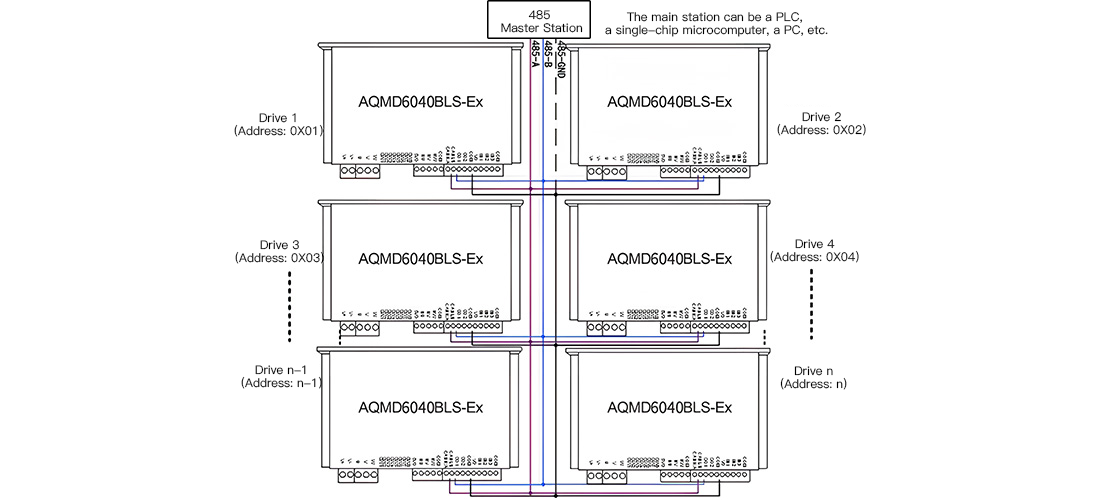
The 485 communication lines of each driver are connected in parallel in the form of A-A and B-B and then linked to A 485 master station. The 485 master station operates each driver independently through the slave station address configured by the driver. The address configured for each drive should be unique and cannot be duplicated with that of other drives.
6. Connection method of CAN multi-node control
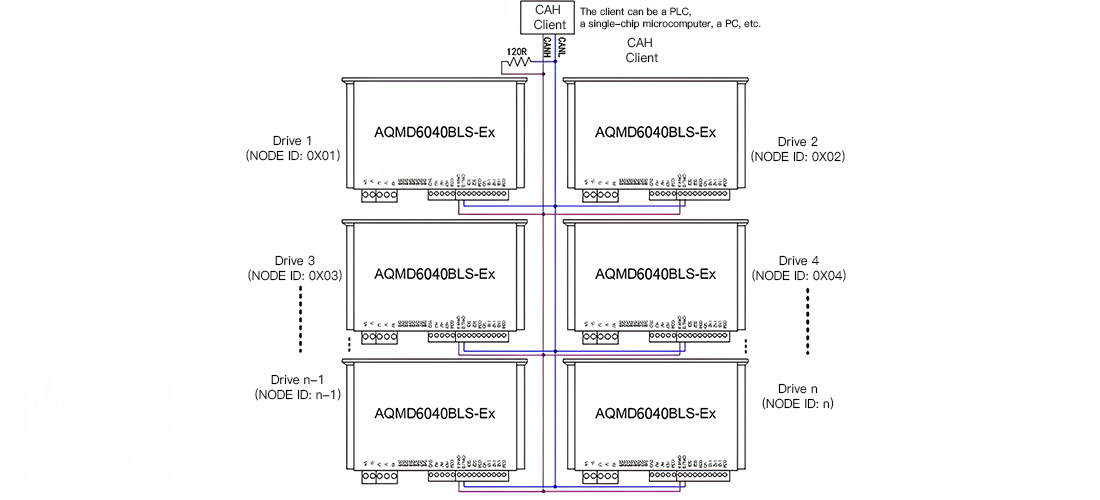
The CAN communication lines of each driver are connected in parallel in the form of CANH-CANH and CANL-CANL and then connected to the CAN client. At least one 120Ω resistor is connected in parallel on the CAN bus. The CAN client operates each driver independently through the node ID configured on the driver. The node ID configured for each drive should be unique and cannot be duplicated with that of other drives.
Sample program
Provide a PC sample program, which can be used for parameter configuration, motor debugging or secondary development.
Appendix: Selection reference
Selection Table for AQMD_BLS Series DC Inductive Brushless Motor Drivers
Model number | Functional characteristics | Maximum fit | Maximum current / | Energy braking | Control signal | Product size |
AQMD2403BLS-M | ● Minimal size | 12V18W | 6A/3A | 3A, do not brake frequently with high current | Single/dual potentiometer, 0-3.3V analog signal, logic level, switch, key, PWM, pulse, frequency, RS485 | 45x45x18mm bare board |
AQMD3605BLS-B2 | ● Overheat protection | 12V-30W | 10A/5A | 3A, do not brake frequently with high current | Single/dual potentiometer, 0-3.3V analog signal, logic level, switch, key, PWM, pulse/frequency, RS485 | 70x65x2lmm Raw board |
AQMD2408BLS-M | ● Compact size | 12V-45W | 16A/8A | 3A, non-battery power can not be high current frequent brake reversing | Single/dual potentiometer, 0-3.3V analog signal, logic level, switch, key, PWM, pulse/frequency, RS485 | 55x55x17mm bare board |
AQMD3608BLS | ● Rail mounting | 12V-50W | 10A/8A | 3A, do not brake frequently with high current | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM, pulse/frequency, RS485 | 92x87x30mm bare plate |
AQMD6008BLS-T | ● Compact case | 12V-50W | 16A/8A | 3A | Single/dual potentiometer, 0-3.3V analog signal, logic level, switch, key, PWM, pulse/frequency, RS485 | 93x56x20.5mm |
AOMD6008BLS-TE/-I | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485/CAN | |||||
AOMMD6008BLS-TF/-I | ||||||
AQMD6010BLS-B2 | ● Overheat protection | 12V-60W | 20A/10A | 6A | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485 | 136x82x45mm |
AOMD6010BLS-E2 |
| 20A/10A | 6A | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485/CAN | 136x82x45mm | |
AOMD6010BLS-E2F | 8A | |||||
AQMD6020BLS-E2/E3 |
| 12V-100W | 35A/16A | 6A | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485/CAN | 136x82x45mm |
AOMD6020BLS-E2F | 8A | |||||
AQMD6030BLS-E2/E3 |
| 12V-180W | 40A/25A | 12A | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485/CAN | 136x82x45mm |
AQMD6030BLS-E2F | ||||||
AOMD6040BLS-E2 |
| 12V-240W | 50A/35A | 20A | Single/dual potentiometer, 0-3.3/5/10V analog signal, 0-3.3/5/24V logic level, switch, key, PWM, pulse, frequency, RS485/CAN communication | 178x108x68mm |
AQMD6040BLS-E2F | ||||||
AQMD12H10BLS-E2 | ● Overheat protection | 24V-200W | 25A/12A | 6A | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485/CAN | 136x82x45mm |
AOMD12H30BLS-E2 | ● Overheat protection | 24V-500W | 45A/30A | 12A | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485/CAN | 178x108x68m1 |
AQMD22A04BLS-E2 | ● Overheat protection | 72V-175W | 7A/3.5A | 3A | Single/dual potentiometer, 0-3.3/5/10V analog signal, logic level, switch, key, PWM/ pulse/frequency, RS485/CAN | 136x82x45mm |
Product protection
Multiple protections ensure safety and reliability

Overcurrent protection | Locked rotor protection | Voltage monitoring | Temperature monitoring | Communication isolation | Abnormal current protection |